 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Bayesian Quadrature Policy Optimization
Jun 28, 2020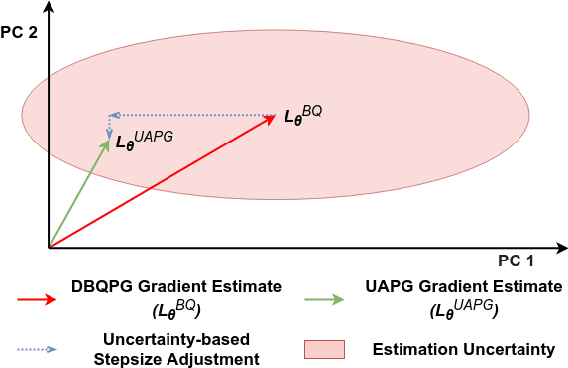
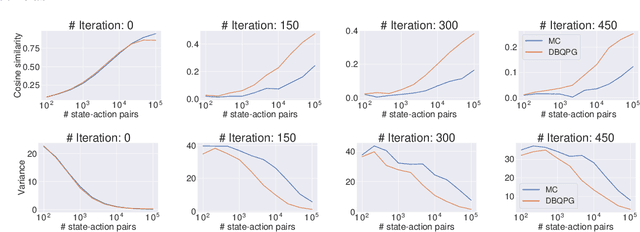
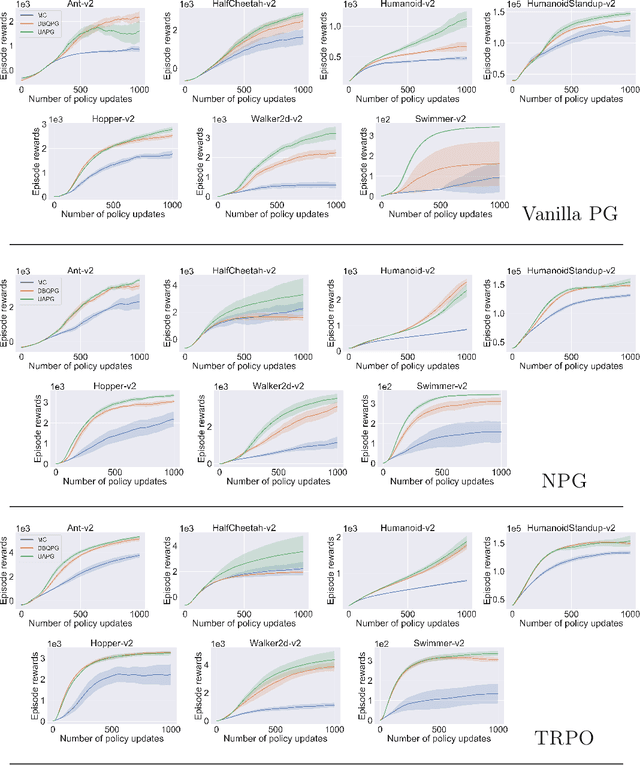
We study the problem of obtaining accurate policy gradient estimates. This challenge manifests in how best to estimate the policy gradient integral equation using a finite number of samples. Monte-Carlo methods have been the default choice for this purpose, despite suffering from high variance in the gradient estimates. On the other hand, more sample efficient alternatives like Bayesian quadrature methods are less scalable due to their high computational complexity. In this work, we propose deep Bayesian quadrature policy gradient (DBQPG), a computationally efficient high-dimensional generalization of Bayesian quadrature, to estimate the policy gradient integral equation. We show that DBQPG can substitute Monte-Carlo estimation in policy gradient methods, and demonstrate its effectiveness on a set of continuous control benchmarks for robotic locomotion. In comparison to Monte-Carlo estimation, DBQPG provides (i) more accurate gradient estimates with a significantly lower variance, (ii) a consistent improvement in the sample complexity and average return for several on-policy deep policy gradient algorithms, and, (iii) a methodological way to quantify the uncertainty in gradient estimation that can be incorporated to further improve the performance.
Enhancing Perceptual Loss with Adversarial Feature Matching for Super-Resolution
May 15, 2020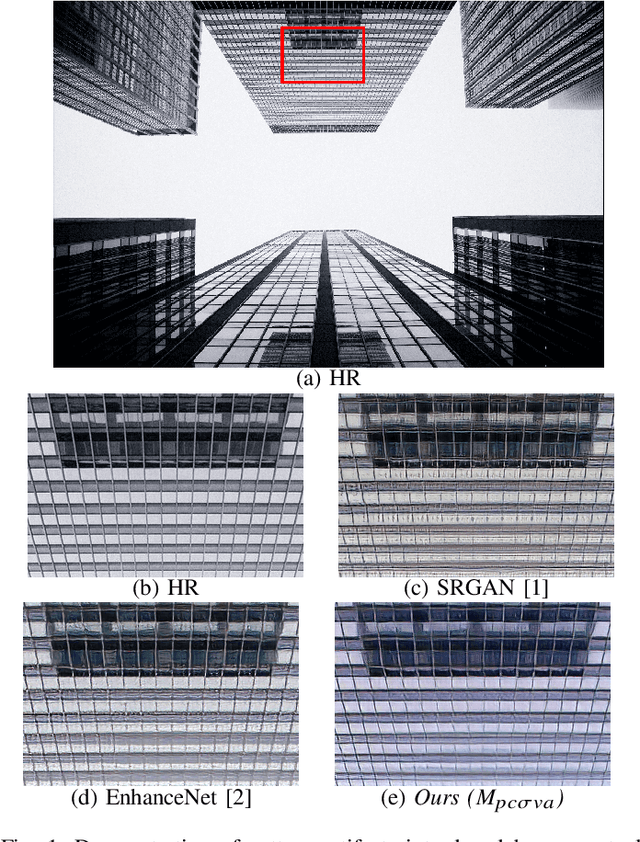
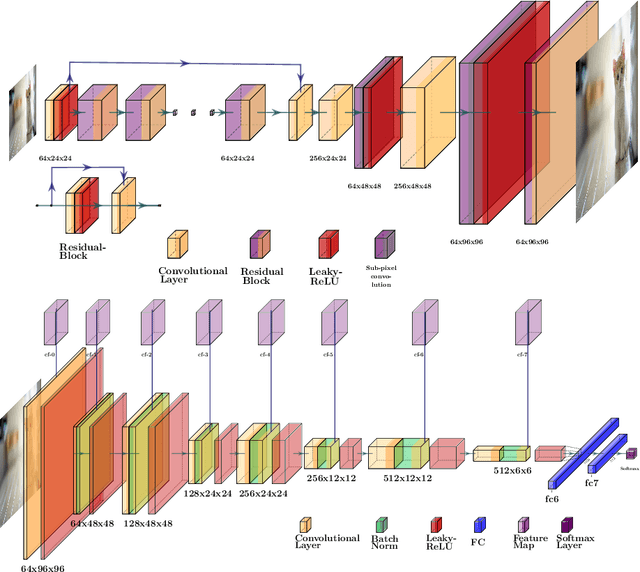
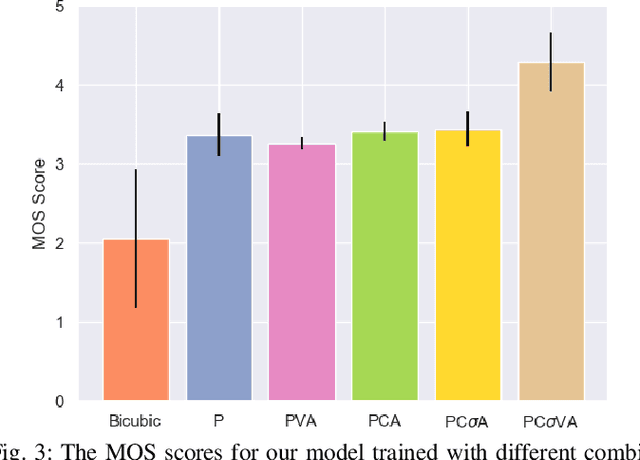
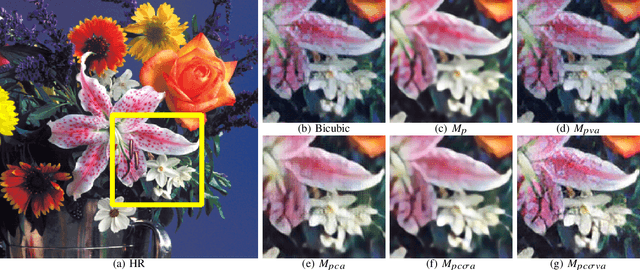
Single image super-resolution (SISR) is an ill-posed problem with an indeterminate number of valid solutions. Solving this problem with neural networks would require access to extensive experience, either presented as a large training set over natural images or a condensed representation from another pre-trained network. Perceptual loss functions, which belong to the latter category, have achieved breakthrough success in SISR and several other computer vision tasks. While perceptual loss plays a central role in the generation of photo-realistic images, it also produces undesired pattern artifacts in the super-resolved outputs. In this paper, we show that the root cause of these pattern artifacts can be traced back to a mismatch between the pre-training objective of perceptual loss and the super-resolution objective. To address this issue, we propose to augment the existing perceptual loss formulation with a novel content loss function that uses the latent features of a discriminator network to filter the unwanted artifacts across several levels of adversarial similarity. Further, our modification has a stabilizing effect on non-convex optimization in adversarial training. The proposed approach offers notable gains in perceptual quality based on an extensive human evaluation study and a competent reconstruction fidelity when tested on objective evaluation metrics.