 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReQuBiS -- Reconfigurable Quadrupedal-Bipedal Snake Robots
Jul 02, 2021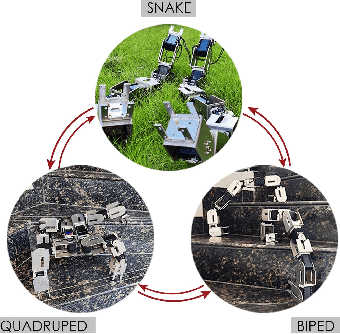
The selection of mobility modes for robot navigation consists of various trade-offs. Snake robots are ideal for traversing through constrained environments such as pipes, cluttered and rough terrain, whereas bipedal robots are more suited for structured environments such as stairs. Finally, quadruped robots are more stable than bipeds and can carry larger payloads than snakes and bipeds but struggle to navigate soft soil, sand, ice, and constrained environments. A reconfigurable robot can achieve the best of all worlds. Unfortunately, state-of-the-art reconfigurable robots rely on the rearrangement of modules through complicated mechanisms to dissemble and assemble at different places, increasing the size, weight, and power (SWaP) requirements. We propose Reconfigurable Quadrupedal-Bipedal Snake Robots (ReQuBiS), which can transform between mobility modes without rearranging modules. Hence, requiring just a single modification mechanism. Furthermore, our design allows the robot to split into two agents to perform tasks in parallel for biped and snake mobility. Experimental results demonstrate these mobility capabilities in snake, quadruped, and biped modes and transitions between them.
Telemanipulation with Chopsticks: Analyzing Human Factors in User Demonstrations
Jul 31, 2020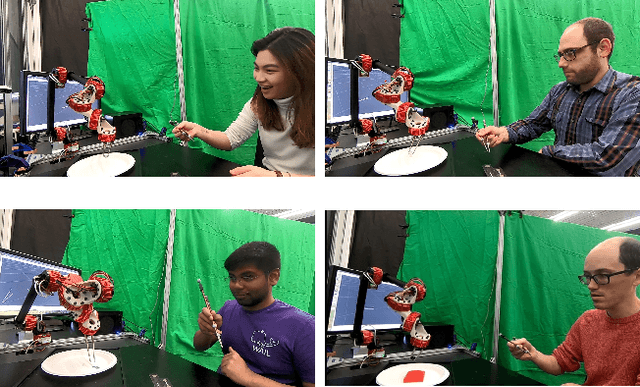
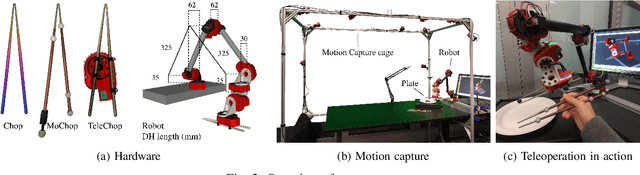

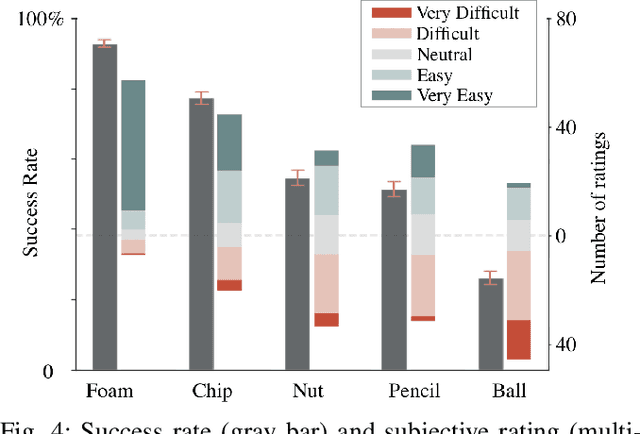
Chopsticks constitute a simple yet versatile tool that humans have used for thousands of years to perform a variety of challenging tasks ranging from food manipulation to surgery. Applying such a simple tool in a diverse repertoire of scenarios requires significant adaptability. Towards developing autonomous manipulators with comparable adaptability to humans, we study chopsticks-based manipulation to gain insights into human manipulation strategies. We conduct a within-subjects user study with 25 participants, evaluating three different data-collection methods: normal chopsticks, motion-captured chopsticks, and a novel chopstick telemanipulation interface. We analyze factors governing human performance across a variety of challenging chopstick-based grasping tasks. Although participants rated teleoperation as the least comfortable and most difficult-to-use method, teleoperation enabled users to achieve the highest success rates on three out of five objects considered. Further, we notice that subjects quickly learned and adapted to the teleoperation interface. Finally, while motion-captured chopsticks could provide a better reflection of how humans use chopsticks, the teleoperation interface can produce quality on-hardware demonstrations from which the robot can directly learn.