 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpsilon-Neighborhood Decision-Boundary Governed Estimation (EDGE) of 2D Black Box Classifier Functions
Apr 13, 2025
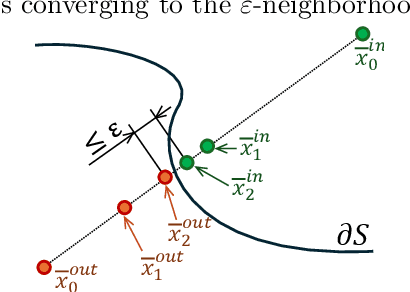


Accurately estimating decision boundaries in black box systems is critical when ensuring safety, quality, and feasibility in real-world applications. However, existing methods iteratively refine boundary estimates by sampling in regions of uncertainty, without providing guarantees on the closeness to the decision boundary and also result in unnecessary exploration that is especially disadvantageous when evaluations are costly. This paper presents the Epsilon-Neighborhood Decision-Boundary Governed Estimation (EDGE), a sample efficient and function-agnostic algorithm that leverages the intermediate value theorem to estimate the location of the decision boundary of a black box binary classifier within a user-specified epsilon-neighborhood. Evaluations are conducted on three nonlinear test functions and a case study of an electric grid stability problem with uncertain renewable power injection. The EDGE algorithm demonstrates superior sample efficiency and better boundary approximation than adaptive sampling techniques and grid-based searches.
ReQuBiS -- Reconfigurable Quadrupedal-Bipedal Snake Robots
Jul 02, 2021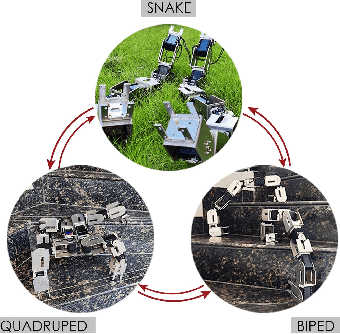
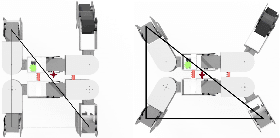
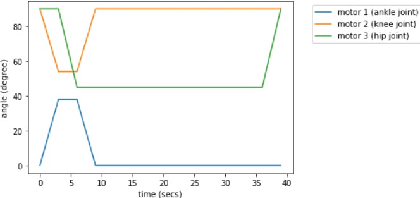
The selection of mobility modes for robot navigation consists of various trade-offs. Snake robots are ideal for traversing through constrained environments such as pipes, cluttered and rough terrain, whereas bipedal robots are more suited for structured environments such as stairs. Finally, quadruped robots are more stable than bipeds and can carry larger payloads than snakes and bipeds but struggle to navigate soft soil, sand, ice, and constrained environments. A reconfigurable robot can achieve the best of all worlds. Unfortunately, state-of-the-art reconfigurable robots rely on the rearrangement of modules through complicated mechanisms to dissemble and assemble at different places, increasing the size, weight, and power (SWaP) requirements. We propose Reconfigurable Quadrupedal-Bipedal Snake Robots (ReQuBiS), which can transform between mobility modes without rearranging modules. Hence, requiring just a single modification mechanism. Furthermore, our design allows the robot to split into two agents to perform tasks in parallel for biped and snake mobility. Experimental results demonstrate these mobility capabilities in snake, quadruped, and biped modes and transitions between them.