 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpsilon-Neighborhood Decision-Boundary Governed Estimation (EDGE) of 2D Black Box Classifier Functions
Apr 13, 2025
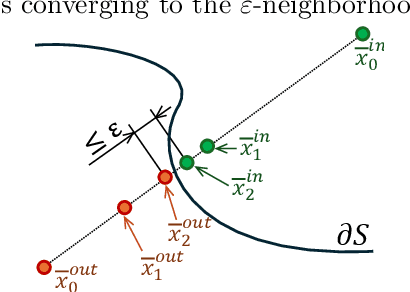


Accurately estimating decision boundaries in black box systems is critical when ensuring safety, quality, and feasibility in real-world applications. However, existing methods iteratively refine boundary estimates by sampling in regions of uncertainty, without providing guarantees on the closeness to the decision boundary and also result in unnecessary exploration that is especially disadvantageous when evaluations are costly. This paper presents the Epsilon-Neighborhood Decision-Boundary Governed Estimation (EDGE), a sample efficient and function-agnostic algorithm that leverages the intermediate value theorem to estimate the location of the decision boundary of a black box binary classifier within a user-specified epsilon-neighborhood. Evaluations are conducted on three nonlinear test functions and a case study of an electric grid stability problem with uncertain renewable power injection. The EDGE algorithm demonstrates superior sample efficiency and better boundary approximation than adaptive sampling techniques and grid-based searches.
A Convex Hull Cheapest Insertion Heuristic for the Non-Euclidean and Precedence Constrained TSPs
Feb 05, 2023The convex hull cheapest insertion heuristic is known to generate good solutions to the Euclidean Traveling Salesperson Problem. This paper presents an adaptation of this heuristic to the non-Euclidean version of the problem and further extends it to the problem with precedence constraints, also known as the Sequential Ordering Problem. To test the proposed algorithm, the well-known TSPLIB benchmark data-set is modified in a replicable manner to create non-Euclidean instances and precedence constraints. The proposed algorithm is shown to outperform the commonly used Nearest Neighbor algorithm in 97% of the cases that do not have precedence constraints. When precedence constraints exist such that the child nodes are centrally located, the algorithm again outperforms the Nearest Neighbor algorithm in 98% of the studied instances. Considering all spatial layouts of precedence constraints, the algorithm outperforms the Nearest Neighbor heuristic 68% of the time.