 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Models Encode Clinical Knowledge
Dec 26, 2022Large language models (LLMs) have demonstrated impressive capabilities in natural language understanding and generation, but the quality bar for medical and clinical applications is high. Today, attempts to assess models' clinical knowledge typically rely on automated evaluations on limited benchmarks. There is no standard to evaluate model predictions and reasoning across a breadth of tasks. To address this, we present MultiMedQA, a benchmark combining six existing open question answering datasets spanning professional medical exams, research, and consumer queries; and HealthSearchQA, a new free-response dataset of medical questions searched online. We propose a framework for human evaluation of model answers along multiple axes including factuality, precision, possible harm, and bias. In addition, we evaluate PaLM (a 540-billion parameter LLM) and its instruction-tuned variant, Flan-PaLM, on MultiMedQA. Using a combination of prompting strategies, Flan-PaLM achieves state-of-the-art accuracy on every MultiMedQA multiple-choice dataset (MedQA, MedMCQA, PubMedQA, MMLU clinical topics), including 67.6% accuracy on MedQA (US Medical License Exam questions), surpassing prior state-of-the-art by over 17%. However, human evaluation reveals key gaps in Flan-PaLM responses. To resolve this we introduce instruction prompt tuning, a parameter-efficient approach for aligning LLMs to new domains using a few exemplars. The resulting model, Med-PaLM, performs encouragingly, but remains inferior to clinicians. We show that comprehension, recall of knowledge, and medical reasoning improve with model scale and instruction prompt tuning, suggesting the potential utility of LLMs in medicine. Our human evaluations reveal important limitations of today's models, reinforcing the importance of both evaluation frameworks and method development in creating safe, helpful LLM models for clinical applications.
Non-Markov Policies to Reduce Sequential Failures in Robot Bin Picking
Jul 20, 2020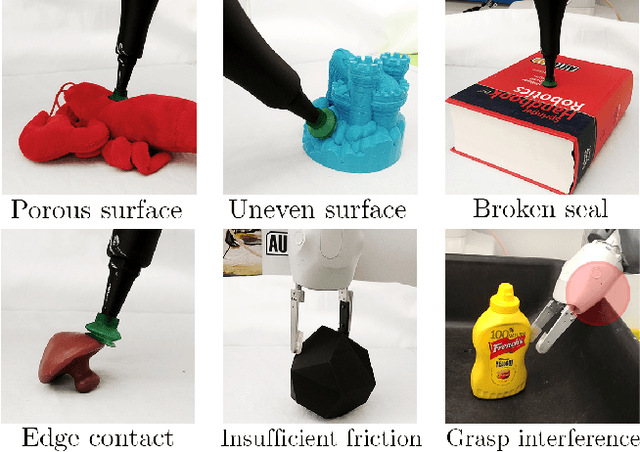
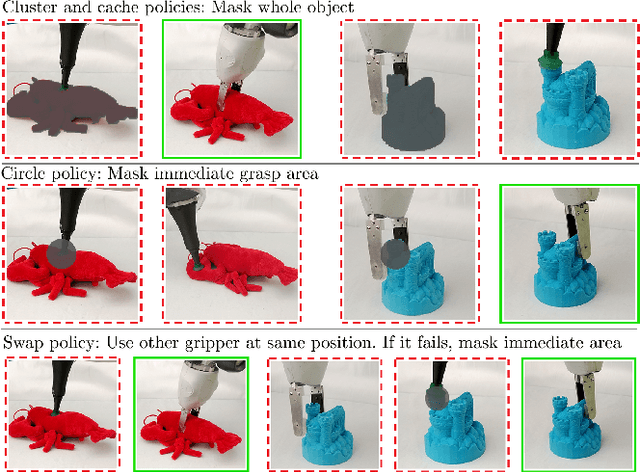

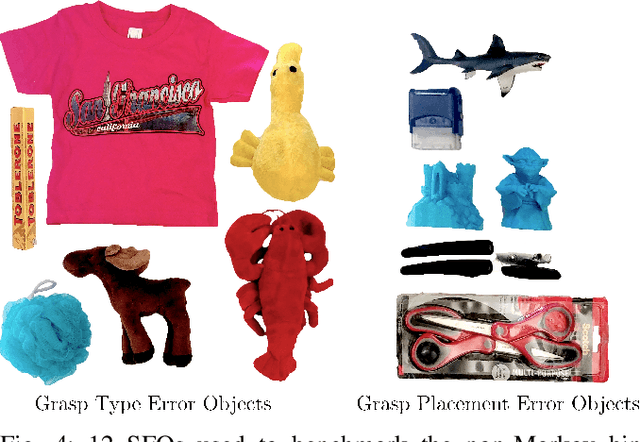
A new generation of automated bin picking systems using deep learning is evolving to support increasing demand for e-commerce. To accommodate a wide variety of products, many automated systems include multiple gripper types and/or tool changers. However, for some objects, sequential grasp failures are common: when a computed grasp fails to lift and remove the object, the bin is often left unchanged; as the sensor input is consistent, the system retries the same grasp over and over, resulting in a significant reduction in mean successful picks per hour (MPPH). Based on an empirical study of sequential failures, we characterize a class of "sequential failure objects" (SFOs) -- objects prone to sequential failures based on a novel taxonomy. We then propose three non-Markov picking policies that incorporate memory of past failures to modify subsequent actions. Simulation experiments on SFO models and the EGAD dataset suggest that the non-Markov policies significantly outperform the Markov policy in terms of the sequential failure rate and MPPH. In physical experiments on 50 heaps of 12 SFOs the most effective Non-Markov policy increased MPPH over the Dex-Net Markov policy by 107%.