 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Latent Neural Dynamics with Gaussian Process Switching Linear Dynamical Systems
Jul 19, 2024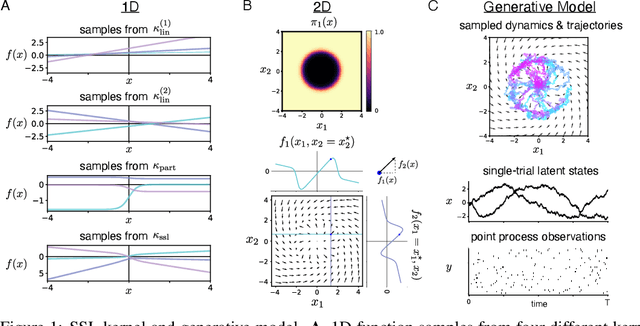
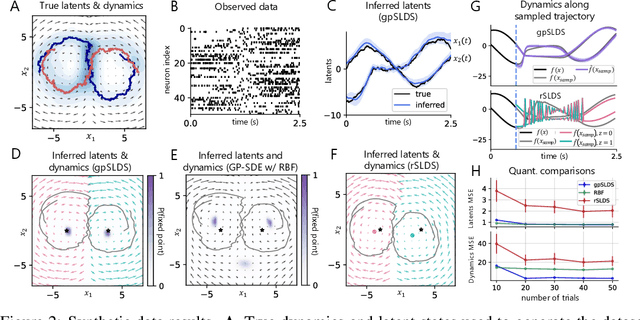
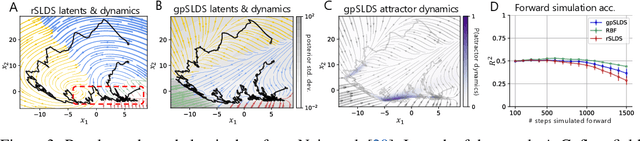
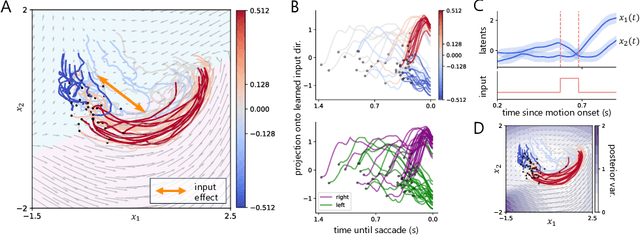
Understanding how the collective activity of neural populations relates to computation and ultimately behavior is a key goal in neuroscience. To this end, statistical methods which describe high-dimensional neural time series in terms of low-dimensional latent dynamics have played a fundamental role in characterizing neural systems. Yet, what constitutes a successful method involves two opposing criteria: (1) methods should be expressive enough to capture complex nonlinear dynamics, and (2) they should maintain a notion of interpretability often only warranted by simpler linear models. In this paper, we develop an approach that balances these two objectives: the Gaussian Process Switching Linear Dynamical System (gpSLDS). Our method builds on previous work modeling the latent state evolution via a stochastic differential equation whose nonlinear dynamics are described by a Gaussian process (GP-SDEs). We propose a novel kernel function which enforces smoothly interpolated locally linear dynamics, and therefore expresses flexible -- yet interpretable -- dynamics akin to those of recurrent switching linear dynamical systems (rSLDS). Our approach resolves key limitations of the rSLDS such as artifactual oscillations in dynamics near discrete state boundaries, while also providing posterior uncertainty estimates of the dynamics. To fit our models, we leverage a modified learning objective which improves the estimation accuracy of kernel hyperparameters compared to previous GP-SDE fitting approaches. We apply our method to synthetic data and data recorded in two neuroscience experiments and demonstrate favorable performance in comparison to the rSLDS.
Legged Robots for Object Manipulation: A Review
Mar 29, 2023Legged robots can have a unique role in manipulating objects in dynamic, human-centric, or otherwise inaccessible environments. Although most legged robotics research to date typically focuses on traversing these challenging environments, many legged platform demonstrations have also included "moving an object" as a way of doing tangible work. Legged robots can be designed to manipulate a particular type of object (e.g., a cardboard box, a soccer ball, or a larger piece of furniture), by themselves or collaboratively. The objective of this review is to collect and learn from these examples, to both organize the work done so far in the community and highlight interesting open avenues for future work. This review categorizes existing works into four main manipulation methods: object interactions without grasping, manipulation with walking legs, dedicated non-locomotive arms, and legged teams. Each method has different design and autonomy features, which are illustrated by available examples in the literature. Based on a few simplifying assumptions, we further provide quantitative comparisons for the range of possible relative sizes of the manipulated object with respect to the robot. Taken together, these examples suggest new directions for research in legged robot manipulation, such as multifunctional limbs, terrain modeling, or learning-based control, to support a number of new deployments in challenging indoor/outdoor scenarios in warehouses/construction sites, preserved natural areas, and especially for home robotics.