 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStep-DeepResearch Technical Report
Dec 24, 2025As LLMs shift toward autonomous agents, Deep Research has emerged as a pivotal metric. However, existing academic benchmarks like BrowseComp often fail to meet real-world demands for open-ended research, which requires robust skills in intent recognition, long-horizon decision-making, and cross-source verification. To address this, we introduce Step-DeepResearch, a cost-effective, end-to-end agent. We propose a Data Synthesis Strategy Based on Atomic Capabilities to reinforce planning and report writing, combined with a progressive training path from agentic mid-training to SFT and RL. Enhanced by a Checklist-style Judger, this approach significantly improves robustness. Furthermore, to bridge the evaluation gap in the Chinese domain, we establish ADR-Bench for realistic deep research scenarios. Experimental results show that Step-DeepResearch (32B) scores 61.4% on Scale AI Research Rubrics. On ADR-Bench, it significantly outperforms comparable models and rivals SOTA closed-source models like OpenAI and Gemini DeepResearch. These findings prove that refined training enables medium-sized models to achieve expert-level capabilities at industry-leading cost-efficiency.
HyDRA: A Hybrid Dual-Mode Network for Closed- and Open-Set RFFI with Optimized VMD
Jul 16, 2025Device recognition is vital for security in wireless communication systems, particularly for applications like access control. Radio Frequency Fingerprint Identification (RFFI) offers a non-cryptographic solution by exploiting hardware-induced signal distortions. This paper proposes HyDRA, a Hybrid Dual-mode RF Architecture that integrates an optimized Variational Mode Decomposition (VMD) with a novel architecture based on the fusion of Convolutional Neural Networks (CNNs), Transformers, and Mamba components, designed to support both closed-set and open-set classification tasks. The optimized VMD enhances preprocessing efficiency and classification accuracy by fixing center frequencies and using closed-form solutions. HyDRA employs the Transformer Dynamic Sequence Encoder (TDSE) for global dependency modeling and the Mamba Linear Flow Encoder (MLFE) for linear-complexity processing, adapting to varying conditions. Evaluation on public datasets demonstrates state-of-the-art (SOTA) accuracy in closed-set scenarios and robust performance in our proposed open-set classification method, effectively identifying unauthorized devices. Deployed on NVIDIA Jetson Xavier NX, HyDRA achieves millisecond-level inference speed with low power consumption, providing a practical solution for real-time wireless authentication in real-world environments.
DTMamba : Dual Twin Mamba for Time Series Forecasting
May 11, 2024We utilized the Mamba model for time series data prediction tasks, and the experimental results indicate that our model performs well.
A differentiable brain simulator bridging brain simulation and brain-inspired computing
Nov 09, 2023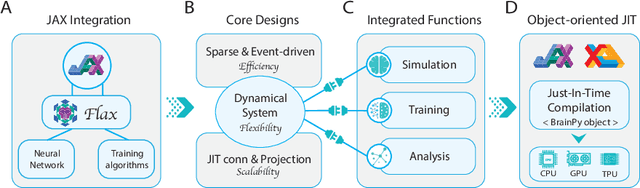

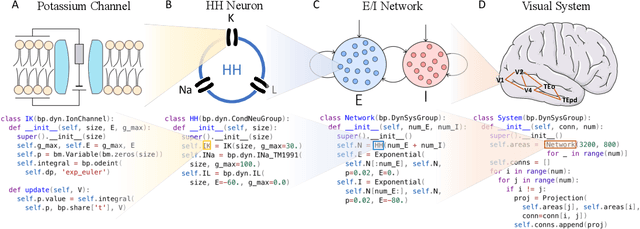

Brain simulation builds dynamical models to mimic the structure and functions of the brain, while brain-inspired computing (BIC) develops intelligent systems by learning from the structure and functions of the brain. The two fields are intertwined and should share a common programming framework to facilitate each other's development. However, none of the existing software in the fields can achieve this goal, because traditional brain simulators lack differentiability for training, while existing deep learning (DL) frameworks fail to capture the biophysical realism and complexity of brain dynamics. In this paper, we introduce BrainPy, a differentiable brain simulator developed using JAX and XLA, with the aim of bridging the gap between brain simulation and BIC. BrainPy expands upon the functionalities of JAX, a powerful AI framework, by introducing complete capabilities for flexible, efficient, and scalable brain simulation. It offers a range of sparse and event-driven operators for efficient and scalable brain simulation, an abstraction for managing the intricacies of synaptic computations, a modular and flexible interface for constructing multi-scale brain models, and an object-oriented just-in-time compilation approach to handle the memory-intensive nature of brain dynamics. We showcase the efficiency and scalability of BrainPy on benchmark tasks, highlight its differentiable simulation for biologically plausible spiking models, and discuss its potential to support research at the intersection of brain simulation and BIC.
Legged Robots for Object Manipulation: A Review
Mar 29, 2023Legged robots can have a unique role in manipulating objects in dynamic, human-centric, or otherwise inaccessible environments. Although most legged robotics research to date typically focuses on traversing these challenging environments, many legged platform demonstrations have also included "moving an object" as a way of doing tangible work. Legged robots can be designed to manipulate a particular type of object (e.g., a cardboard box, a soccer ball, or a larger piece of furniture), by themselves or collaboratively. The objective of this review is to collect and learn from these examples, to both organize the work done so far in the community and highlight interesting open avenues for future work. This review categorizes existing works into four main manipulation methods: object interactions without grasping, manipulation with walking legs, dedicated non-locomotive arms, and legged teams. Each method has different design and autonomy features, which are illustrated by available examples in the literature. Based on a few simplifying assumptions, we further provide quantitative comparisons for the range of possible relative sizes of the manipulated object with respect to the robot. Taken together, these examples suggest new directions for research in legged robot manipulation, such as multifunctional limbs, terrain modeling, or learning-based control, to support a number of new deployments in challenging indoor/outdoor scenarios in warehouses/construction sites, preserved natural areas, and especially for home robotics.