 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCable Routing and Assembly using Tactile-driven Motion Primitives
Mar 21, 2023Manipulating cables is challenging for robots because of the infinite degrees of freedom of the cables and frequent occlusion by the gripper and the environment. These challenges are further complicated by the dexterous nature of the operations required for cable routing and assembly, such as weaving and inserting, hampering common solutions with vision-only sensing. In this paper, we propose to integrate tactile-guided low-level motion control with high-level vision-based task parsing for a challenging task: cable routing and assembly on a reconfigurable task board. Specifically, we build a library of tactile-guided motion primitives using a fingertip GelSight sensor, where each primitive reliably accomplishes an operation such as cable following and weaving. The overall task is inferred via visual perception given a goal configuration image, and then used to generate the primitive sequence. Experiments demonstrate the effectiveness of individual tactile-guided primitives and the integrated end-to-end solution, significantly outperforming the method without tactile sensing. Our reconfigurable task setup and proposed baselines provide a benchmark for future research in cable manipulation. More details and video are presented in \url{https://helennn.github.io/cable-manip/}
Design of a Fully Actuated Robotic Hand With Multiple Gelsight Tactile Sensors
Feb 06, 2020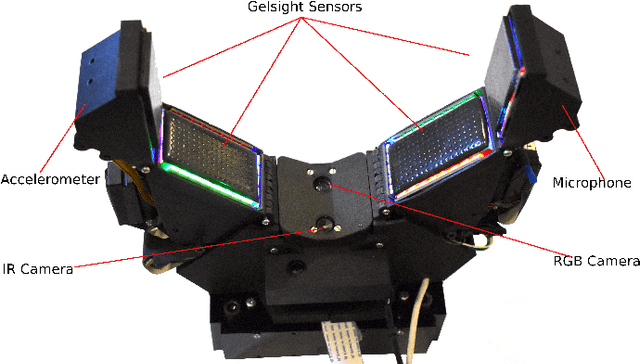
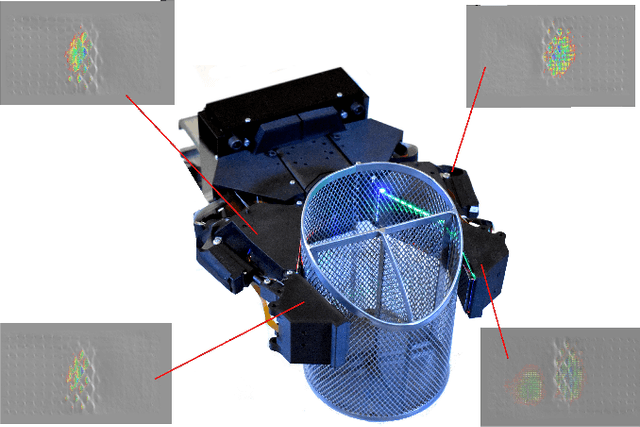
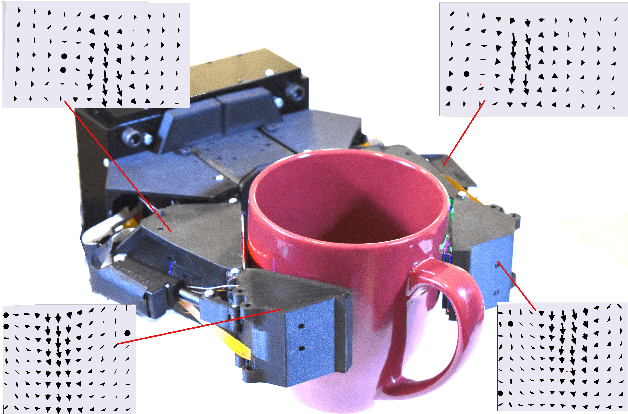

This work details the design of a novel two finger robot gripper with multiple Gelsight based optical-tactile sensors covering the inner surface of the hand. The multiple Gelsight sensors can gather the surface topology of the object from multiple views simultaneously as well as can track the shear and tensile stress. In addition, other sensing modalities enable the hand to gather the thermal, acoustic and vibration information from the object being grasped. The force controlled gripper is fully actuated so that it can be used for various grasp configurations and can also be used for in-hand manipulation tasks. Here we present the design of such a gripper.