Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Fully Actuated Robotic Hand With Multiple Gelsight Tactile Sensors
Paper and Code
Feb 06, 2020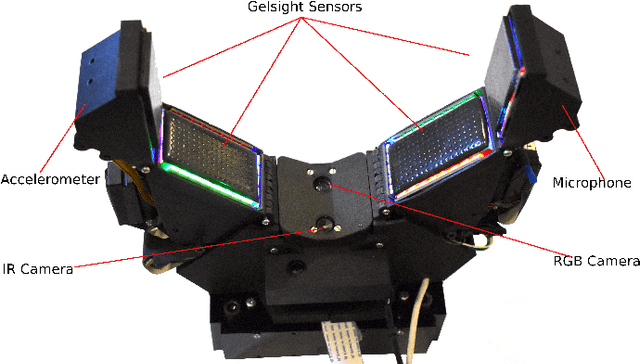
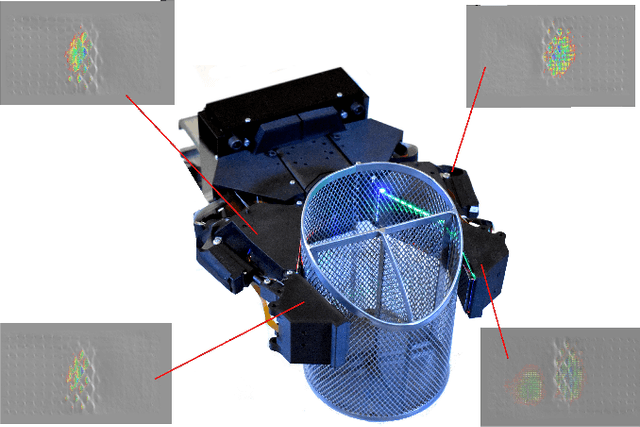
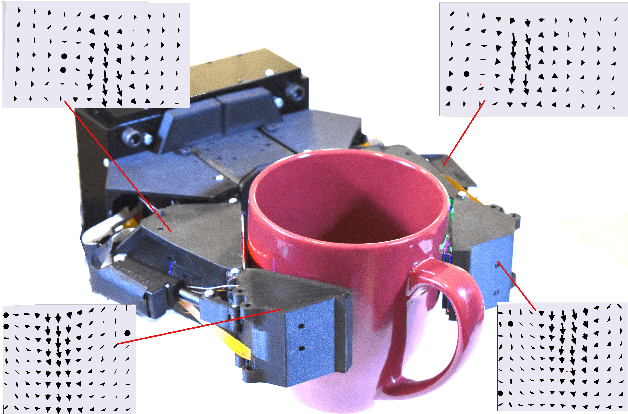

This work details the design of a novel two finger robot gripper with multiple Gelsight based optical-tactile sensors covering the inner surface of the hand. The multiple Gelsight sensors can gather the surface topology of the object from multiple views simultaneously as well as can track the shear and tensile stress. In addition, other sensing modalities enable the hand to gather the thermal, acoustic and vibration information from the object being grasped. The force controlled gripper is fully actuated so that it can be used for various grasp configurations and can also be used for in-hand manipulation tasks. Here we present the design of such a gripper.
View paper on