 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgesynth-dacl: Does Synthetic Defect Data Enhance Segmentation Accuracy and Robustness for Real-World Bridge Inspections?
Jun 17, 2025Adequate bridge inspection is increasingly challenging in many countries due to growing ailing stocks, compounded with a lack of staff and financial resources. Automating the key task of visual bridge inspection, classification of defects and building components on pixel level, improves efficiency, increases accuracy and enhances safety in the inspection process and resulting building assessment. Models overtaking this task must cope with an assortment of real-world conditions. They must be robust to variations in image quality, as well as background texture, as defects often appear on surfaces of diverse texture and degree of weathering. dacl10k is the largest and most diverse dataset for real-world concrete bridge inspections. However, the dataset exhibits class imbalance, which leads to notably poor model performance particularly when segmenting fine-grained classes such as cracks and cavities. This work introduces "synth-dacl", a compilation of three novel dataset extensions based on synthetic concrete textures. These extensions are designed to balance class distribution in dacl10k and enhance model performance, especially for crack and cavity segmentation. When incorporating the synth-dacl extensions, we observe substantial improvements in model robustness across 15 perturbed test sets. Notably, on the perturbed test set, a model trained on dacl10k combined with all synthetic extensions achieves a 2% increase in mean IoU, F1 score, Recall, and Precision compared to the same model trained solely on dacl10k.
Uncertainty-Aware Decomposed Hybrid Networks
Mar 24, 2025The robustness of image recognition algorithms remains a critical challenge, as current models often depend on large quantities of labeled data. In this paper, we propose a hybrid approach that combines the adaptability of neural networks with the interpretability, transparency, and robustness of domain-specific quasi-invariant operators. Our method decomposes the recognition into multiple task-specific operators that focus on different characteristics, supported by a novel confidence measurement tailored to these operators. This measurement enables the network to prioritize reliable features and accounts for noise. We argue that our design enhances transparency and robustness, leading to improved performance, particularly in low-data regimes. Experimental results in traffic sign detection highlight the effectiveness of the proposed method, especially in semi-supervised and unsupervised scenarios, underscoring its potential for data-constrained applications.
Mitigating the Stability-Plasticity Dilemma in Adaptive Train Scheduling with Curriculum-Driven Continual DQN Expansion
Aug 19, 2024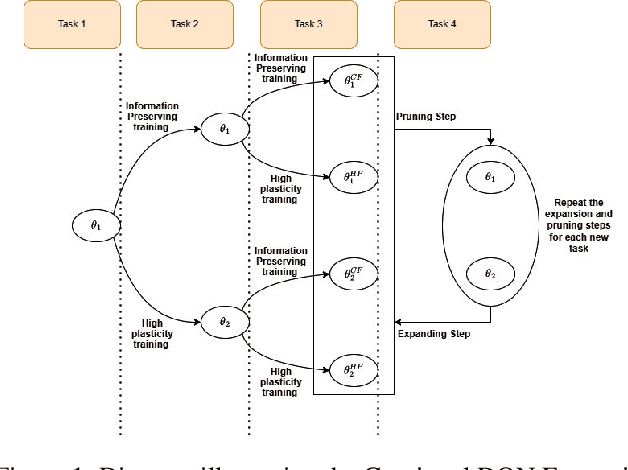


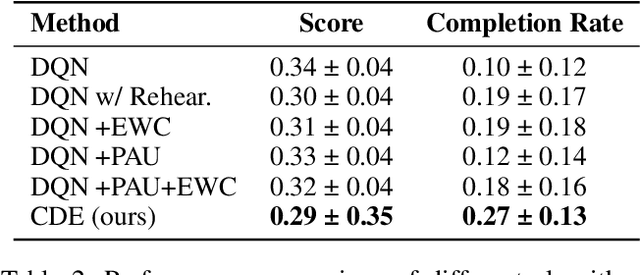
A continual learning agent builds on previous experiences to develop increasingly complex behaviors by adapting to non-stationary and dynamic environments while preserving previously acquired knowledge. However, scaling these systems presents significant challenges, particularly in balancing the preservation of previous policies with the adaptation of new ones to current environments. This balance, known as the stability-plasticity dilemma, is especially pronounced in complex multi-agent domains such as the train scheduling problem, where environmental and agent behaviors are constantly changing, and the search space is vast. In this work, we propose addressing these challenges in the train scheduling problem using curriculum learning. We design a curriculum with adjacent skills that build on each other to improve generalization performance. Introducing a curriculum with distinct tasks introduces non-stationarity, which we address by proposing a new algorithm: Continual Deep Q-Network (DQN) Expansion (CDE). Our approach dynamically generates and adjusts Q-function subspaces to handle environmental changes and task requirements. CDE mitigates catastrophic forgetting through EWC while ensuring high plasticity using adaptive rational activation functions. Experimental results demonstrate significant improvements in learning efficiency and adaptability compared to RL baselines and other adapted methods for continual learning, highlighting the potential of our method in managing the stability-plasticity dilemma in the adaptive train scheduling setting.
Designing a Hybrid Neural System to Learn Real-world Crack Segmentation from Fractal-based Simulation
Sep 18, 2023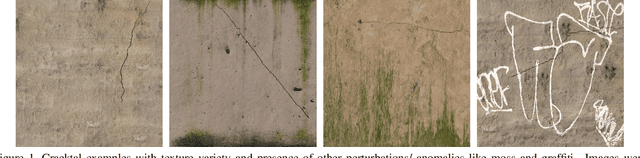
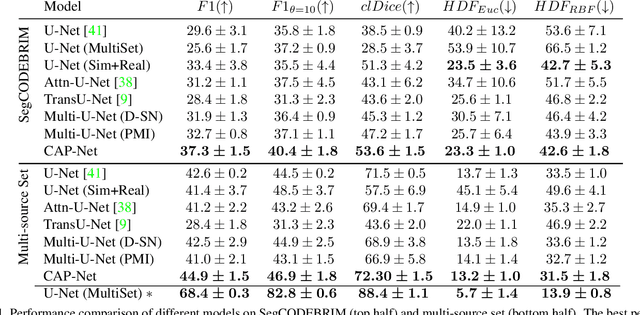
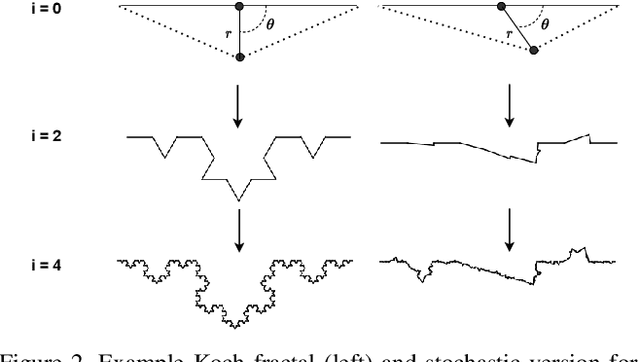
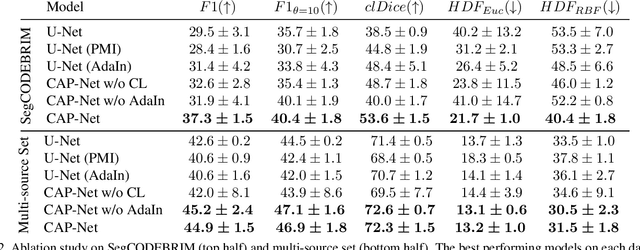
Identification of cracks is essential to assess the structural integrity of concrete infrastructure. However, robust crack segmentation remains a challenging task for computer vision systems due to the diverse appearance of concrete surfaces, variable lighting and weather conditions, and the overlapping of different defects. In particular recent data-driven methods struggle with the limited availability of data, the fine-grained and time-consuming nature of crack annotation, and face subsequent difficulty in generalizing to out-of-distribution samples. In this work, we move past these challenges in a two-fold way. We introduce a high-fidelity crack graphics simulator based on fractals and a corresponding fully-annotated crack dataset. We then complement the latter with a system that learns generalizable representations from simulation, by leveraging both a pointwise mutual information estimate along with adaptive instance normalization as inductive biases. Finally, we empirically highlight how different design choices are symbiotic in bridging the simulation to real gap, and ultimately demonstrate that our introduced system can effectively handle real-world crack segmentation.