 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMin-Sum Uniform Coverage Problem by Autonomous Mobile Robots
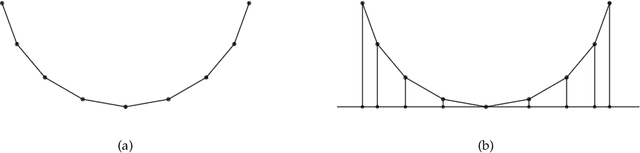
Feb 11, 2026We study the \textit{min-sum uniform coverage} problem for a swarm of $n$ mobile robots on a given finite line segment and on a circle having finite positive radius, where the circle is given as an input. The robots must coordinate their movements to reach a uniformly spaced configuration that minimizes the total distance traveled by all robots. The robots are autonomous, anonymous, identical, and homogeneous, and operate under the \textit{Look-Compute-Move} (LCM) model with \textit{non-rigid} motion controlled by a fair asynchronous scheduler. They are oblivious and silent, possessing neither persistent memory nor a means of explicit communication. In the \textbf{line-segment setting}, the \textit{min-sum uniform coverage} problem requires placing the robots at uniformly spaced points along the segment so as to minimize the total distance traveled by all robots. In the \textbf{circle setting} for this problem, the robots have to arrange themselves uniformly around the given circle to form a regular $n$-gon. There is no fixed orientation or designated starting vertex, and the goal is to minimize the total distance traveled by all the robots. We present a deterministic distributed algorithm that achieves uniform coverage in the line-segment setting with minimum total movement cost. For the circle setting, we characterize all initial configurations for which the \textit{min-sum uniform coverage} problem is deterministically unsolvable under the considered robot model. For all the other remaining configurations, we provide a deterministic distributed algorithm that achieves uniform coverage while minimizing the total distance traveled. These results characterize the deterministic solvability of min-sum coverage for oblivious robots and achieve optimal cost whenever solvable.
Stability and Accuracy Trade-offs in Statistical Estimation
Jan 16, 2026Algorithmic stability is a central concept in statistics and learning theory that measures how sensitive an algorithm's output is to small changes in the training data. Stability plays a crucial role in understanding generalization, robustness, and replicability, and a variety of stability notions have been proposed in different learning settings. However, while stability entails desirable properties, it is typically not sufficient on its own for statistical learning -- and indeed, it may be at odds with accuracy, since an algorithm that always outputs a constant function is perfectly stable but statistically meaningless. Thus, it is essential to understand the potential statistical cost of stability. In this work, we address this question by adopting a statistical decision-theoretic perspective, treating stability as a constraint in estimation. Focusing on two representative notions-worst-case stability and average-case stability-we first establish general lower bounds on the achievable estimation accuracy under each type of stability constraint. We then develop optimal stable estimators for four canonical estimation problems, including several mean estimation and regression settings. Together, these results characterize the optimal trade-offs between stability and accuracy across these tasks. Our findings formalize the intuition that average-case stability imposes a qualitatively weaker restriction than worst-case stability, and they further reveal that the gap between these two can vary substantially across different estimation problems.
Optimal Federated Learning for Functional Mean Estimation under Heterogeneous Privacy Constraints
Dec 25, 2024Federated learning (FL) is a distributed machine learning technique designed to preserve data privacy and security, and it has gained significant importance due to its broad range of applications. This paper addresses the problem of optimal functional mean estimation from discretely sampled data in a federated setting. We consider a heterogeneous framework where the number of individuals, measurements per individual, and privacy parameters vary across one or more servers, under both common and independent design settings. In the common design setting, the same design points are measured for each individual, whereas in the independent design, each individual has their own random collection of design points. Within this framework, we establish minimax upper and lower bounds for the estimation error of the underlying mean function, highlighting the nuanced differences between common and independent designs under distributed privacy constraints. We propose algorithms that achieve the optimal trade-off between privacy and accuracy and provide optimality results that quantify the fundamental limits of private functional mean estimation across diverse distributed settings. These results characterize the cost of privacy and offer practical insights into the potential for privacy-preserving statistical analysis in federated environments.
Minimax And Adaptive Transfer Learning for Nonparametric Classification under Distributed Differential Privacy Constraints
Jun 28, 2024



This paper considers minimax and adaptive transfer learning for nonparametric classification under the posterior drift model with distributed differential privacy constraints. Our study is conducted within a heterogeneous framework, encompassing diverse sample sizes, varying privacy parameters, and data heterogeneity across different servers. We first establish the minimax misclassification rate, precisely characterizing the effects of privacy constraints, source samples, and target samples on classification accuracy. The results reveal interesting phase transition phenomena and highlight the intricate trade-offs between preserving privacy and achieving classification accuracy. We then develop a data-driven adaptive classifier that achieves the optimal rate within a logarithmic factor across a large collection of parameter spaces while satisfying the same set of differential privacy constraints. Simulation studies and real-world data applications further elucidate the theoretical analysis with numerical results.
Optimal Federated Learning for Nonparametric Regression with Heterogeneous Distributed Differential Privacy Constraints
Jun 10, 2024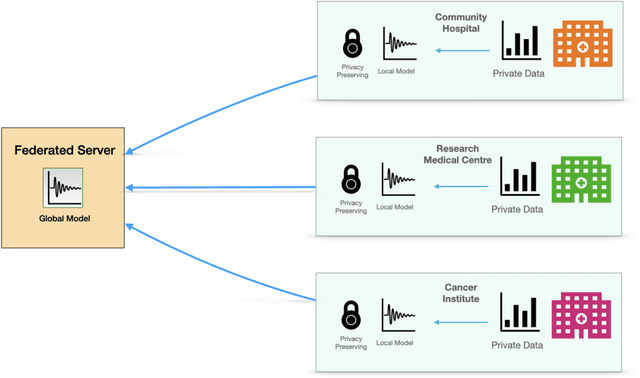
This paper studies federated learning for nonparametric regression in the context of distributed samples across different servers, each adhering to distinct differential privacy constraints. The setting we consider is heterogeneous, encompassing both varying sample sizes and differential privacy constraints across servers. Within this framework, both global and pointwise estimation are considered, and optimal rates of convergence over the Besov spaces are established. Distributed privacy-preserving estimators are proposed and their risk properties are investigated. Matching minimax lower bounds, up to a logarithmic factor, are established for both global and pointwise estimation. Together, these findings shed light on the tradeoff between statistical accuracy and privacy preservation. In particular, we characterize the compromise not only in terms of the privacy budget but also concerning the loss incurred by distributing data within the privacy framework as a whole. This insight captures the folklore wisdom that it is easier to retain privacy in larger samples, and explores the differences between pointwise and global estimation under distributed privacy constraints.
Federated Nonparametric Hypothesis Testing with Differential Privacy Constraints: Optimal Rates and Adaptive Tests
Jun 10, 2024Federated learning has attracted significant recent attention due to its applicability across a wide range of settings where data is collected and analyzed across disparate locations. In this paper, we study federated nonparametric goodness-of-fit testing in the white-noise-with-drift model under distributed differential privacy (DP) constraints. We first establish matching lower and upper bounds, up to a logarithmic factor, on the minimax separation rate. This optimal rate serves as a benchmark for the difficulty of the testing problem, factoring in model characteristics such as the number of observations, noise level, and regularity of the signal class, along with the strictness of the $(\epsilon,\delta)$-DP requirement. The results demonstrate interesting and novel phase transition phenomena. Furthermore, the results reveal an interesting phenomenon that distributed one-shot protocols with access to shared randomness outperform those without access to shared randomness. We also construct a data-driven testing procedure that possesses the ability to adapt to an unknown regularity parameter over a large collection of function classes with minimal additional cost, all while maintaining adherence to the same set of DP constraints.
PrIsing: Privacy-Preserving Peer Effect Estimation via Ising Model
Jan 29, 2024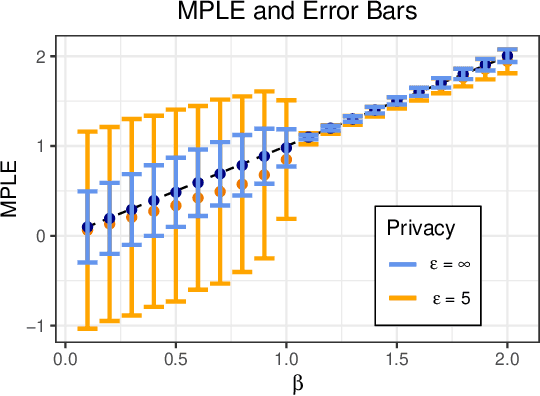
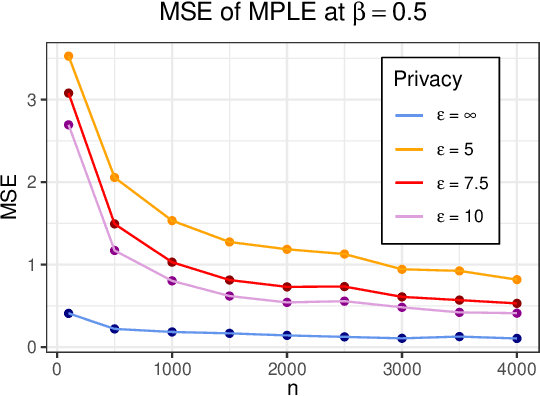
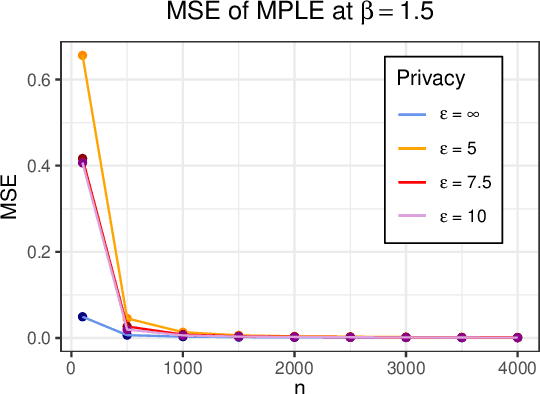
The Ising model, originally developed as a spin-glass model for ferromagnetic elements, has gained popularity as a network-based model for capturing dependencies in agents' outputs. Its increasing adoption in healthcare and the social sciences has raised privacy concerns regarding the confidentiality of agents' responses. In this paper, we present a novel $(\varepsilon,\delta)$-differentially private algorithm specifically designed to protect the privacy of individual agents' outcomes. Our algorithm allows for precise estimation of the natural parameter using a single network through an objective perturbation technique. Furthermore, we establish regret bounds for this algorithm and assess its performance on synthetic datasets and two real-world networks: one involving HIV status in a social network and the other concerning the political leaning of online blogs.
Mutual Visibility by Fat Robots with Slim Omnidirectional Camera
Jun 15, 2022
In the existing literature of the Mutual Visibility problem for autonomous robot swarms, the adopted visibility models have some idealistic assumptions that are not consistent with practical sensing device implementations. This paper investigates the problem in the more realistic visibility model called opaque fat robots with slim omnidirectional camera. The robots are modeled as unit disks, each having an omnidirectional camera represented as a disk of smaller size. We assume that the robots have compasses that allow agreement in the direction and orientation of both axes of their local coordinate systems. The robots are equipped with visible lights which serve as a medium of communication and also as a form of memory. We present a distributed algorithm for the Mutual Visibility problem which is provably correct in the semi-synchronous setting. Our algorithm also provides a solution for Leader Election which we use as a subroutine in our main algorithm. Although Leader Election is trivial with two axis agreement in the full visibility model, it is challenging in our case and is of independent interest.