 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Migration-Assisted Deep Learning Scheme for Imaging Defects Inside Cylindrical Structures via GPR: A Case Study for Tree Trunks
Feb 05, 2026Ground-penetrating radar (GPR) has emerged as a prominent tool for imaging internal defects in cylindrical structures, such as columns, utility poles, and tree trunks. However, accurately reconstructing both the shape and permittivity of the defects inside cylindrical structures remains challenging due to complex wave scattering phenomena and the limited accuracy of the existing signal processing and deep learning techniques. To address these issues, this study proposes a migration-assisted deep learning scheme for reconstructing the shape and permittivity of defects within cylindrical structures. The proposed scheme involves three stages of GPR data processing. First, a dual-permittivity estimation network extracts the permittivity values of the defect and the cylindrical structure, the latter of which is estimated with the help of a novel structural similarity index measure-based autofocusing technique. Second, a modified Kirchhoff migration incorporating the extracted permittivity of the cylindrical structure maps the signals reflected from the defect to the imaging domain. Third, a shape reconstruction network processes the migrated image to recover the precise shape of the defect. The image of the interior defect is finally obtained by combining the reconstructed shape and extracted permittivity of the defect. The proposed scheme is validated using both synthetic and experimental data from a laboratory trunk model and real tree trunk samples. Comparative results show superior performance over existing deep learning methods, while generalization tests on live trees confirm its feasibility for in-field deployment. The underlying principle can further be applied to other circumferential GPR imaging scenarios. The code and database are available at: https://github.com/jwqian54/Migration-Assisted-DL.
A Deep Learning-Augmented Stand-off Radar Scheme for Rapidly Detecting Tree Defects
Jun 08, 2024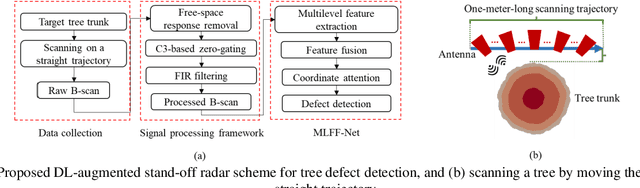
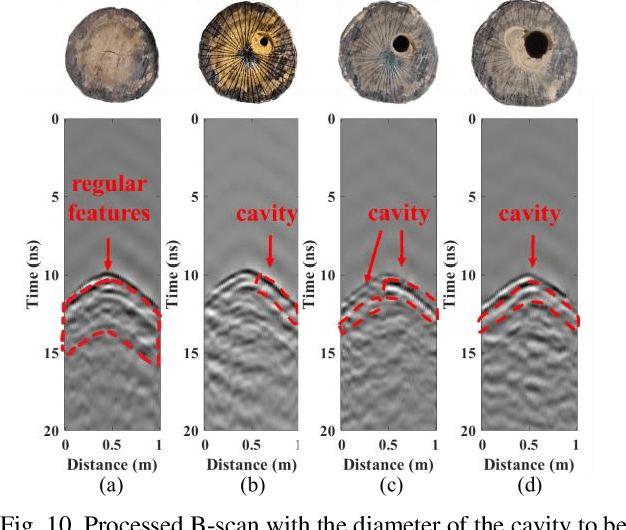
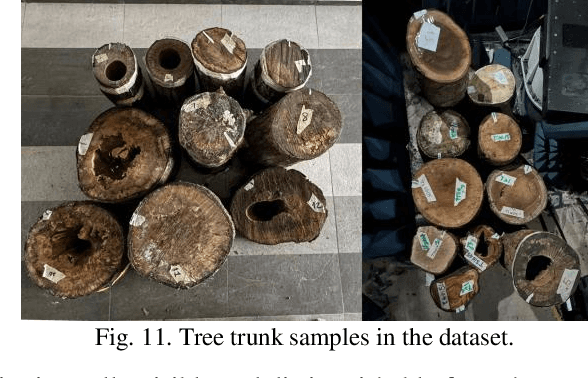
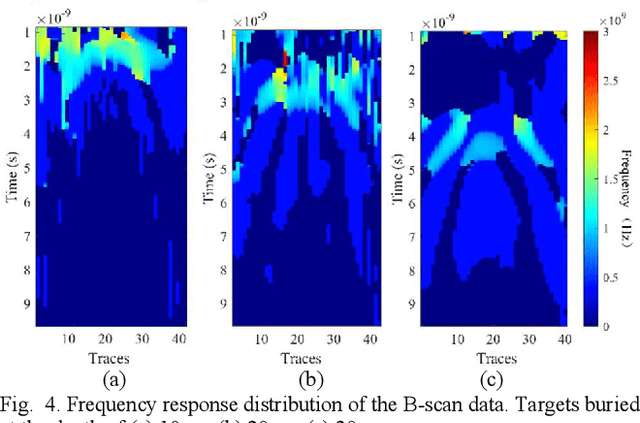
Tree defect detection is crucial for the structural health screening of trees. Existing nondestructive testing (NDT) techniques for tree defect detection require time-consuming and labor-intensive measurement campaigns. This discourages their application for the routine structural health screening of whole populations of managed urban trees. To address this issue, this study proposes a deep-learning augmented stand-off radar scheme for contactless scanning of tree trunks and rapid detection of tree defects. In this scheme, the antenna is moved along a straight trajectory at a distance from the tree trunk to obtain the trunk's B-scan. The obtained raw B-scan is then processed by a signal-processing framework specifically developed for revealing the scattering signatures of defects in B-scan, which achieves a 30 dB and 22 dB increase in the signal-to-clutter and noise ratio of the measurement data of tree trunk samples and living trees, respectively. Finally, the processed B-scan is input into a multilevel feature fusion neural network particularly designed for extracting the signature of the defect in the processed B-scan in real time. The developed scheme's applications to the detection of defects in real fresh-cut tree trunks show that the stand-off radar scheme can detect tree defects with 96% accuracy. This stand-off radar scheme is the first contactless NDT technique for tree defect detection while operated on a straight trajectory and potentially can be integrated into the routine tree inspection workflow which is part of urban tree management.
A Depth-Adaptive Filtering Method for Effective GPR Tree Roots Detection in Tropical Area
May 30, 2023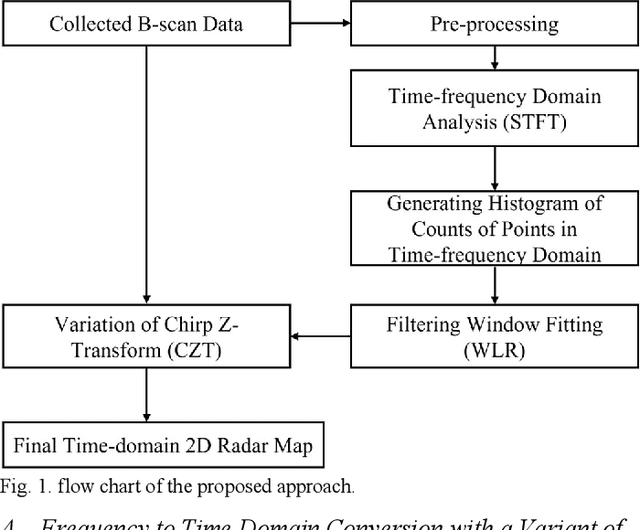

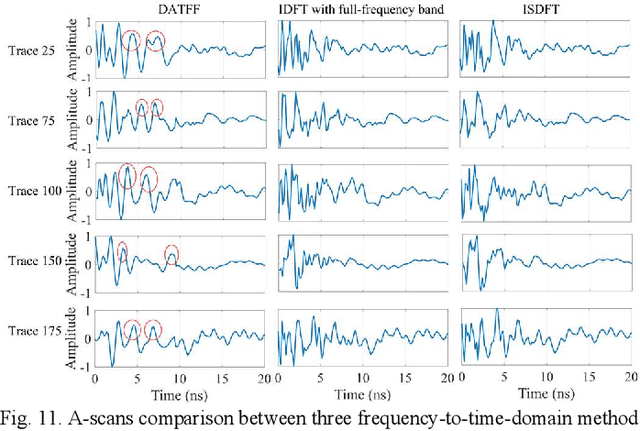
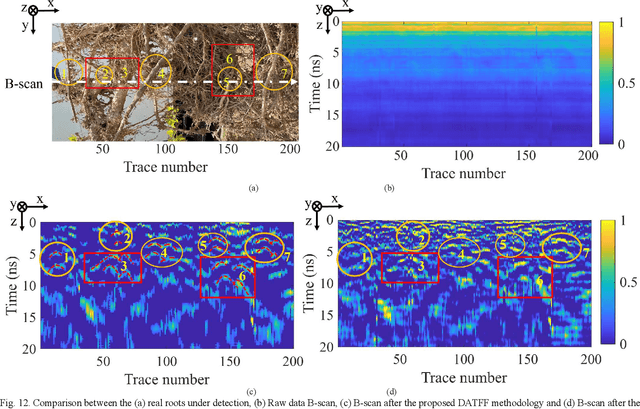
This study presents a technique for processing Stepfrequency continuous wave (SFCW) ground penetrating radar (GPR) data to detect tree roots. SFCW GPR is portable and enables precise control of energy levels, balancing depth and resolution trade-offs. However, the high-frequency components of the transmission band suffers from poor penetrating capability and generates noise that interferes with root detection. The proposed time-frequency filtering technique uses a short-time Fourier transform (STFT) to track changes in frequency spectrum density over time. To obtain the filter window, a weighted linear regression (WLR) method is used. By adopting a conversion method that is a variant of the chirp Z-Transform (CZT), the timefrequency window filters out frequency samples that are not of interest when doing the frequency-to-time domain data conversion. The proposed depth-adaptive filter window can selfadjust to different scenarios, making it independent of soil information and effectively determines subsurface tree roots. The technique is successfully validated using SFCW GPR data from actual sites in a tropical area with different soil moisture levels, and the two-dimensional (2D) radar map of subsurface root systems is highly improved compared to existing methods.
3DInvNet: A Deep Learning-Based 3D Ground-Penetrating Radar Data Inversion
May 09, 2023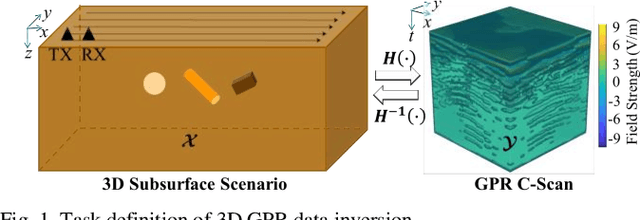

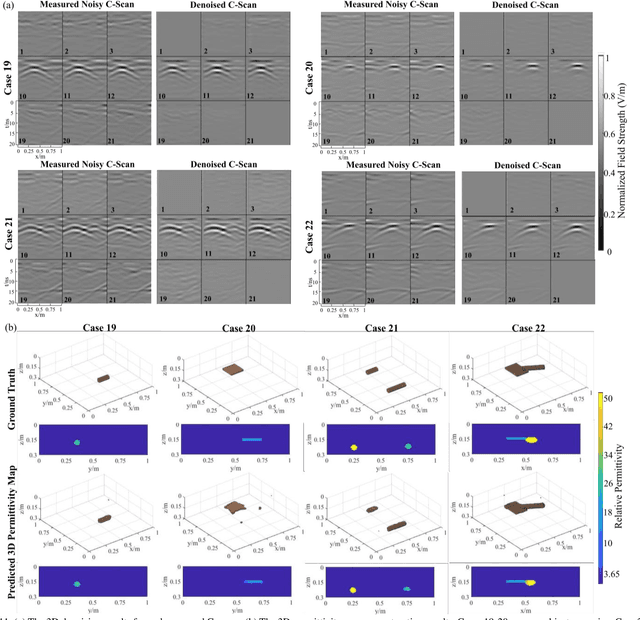
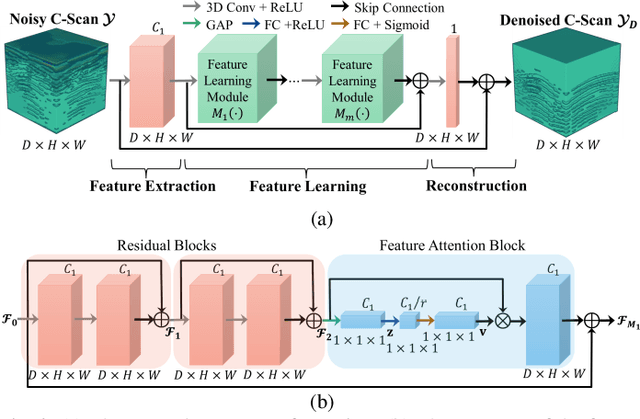
The reconstruction of the 3D permittivity map from ground-penetrating radar (GPR) data is of great importance for mapping subsurface environments and inspecting underground structural integrity. Traditional iterative 3D reconstruction algorithms suffer from strong non-linearity, ill-posedness, and high computational cost. To tackle these issues, a 3D deep learning scheme, called 3DInvNet, is proposed to reconstruct 3D permittivity maps from GPR C-scans. The proposed scheme leverages a prior 3D convolutional neural network with a feature attention mechanism to suppress the noise in the C-scans due to subsurface heterogeneous soil environments. Then a 3D U-shaped encoder-decoder network with multi-scale feature aggregation modules is designed to establish the optimal inverse mapping from the denoised C-scans to 3D permittivity maps. Furthermore, a three-step separate learning strategy is employed to pre-train and fine-tune the networks. The proposed scheme is applied to numerical simulation as well as real measurement data. The quantitative and qualitative results show the network capability, generalizability, and robustness in denoising GPR C-scans and reconstructing 3D permittivity maps of subsurface objects.
A Deep Learning-Based GPR Forward Solver for Predicting B-Scans of Subsurface Objects
Jul 13, 2022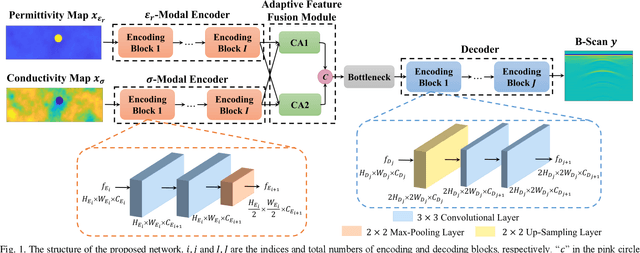
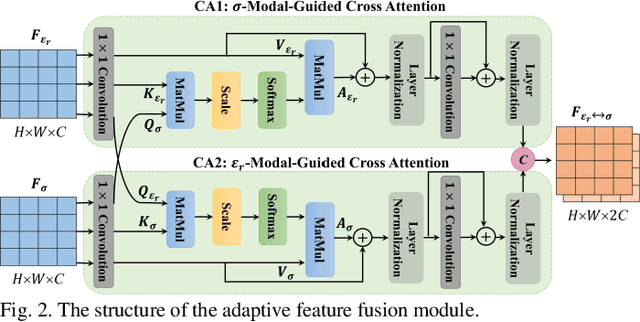
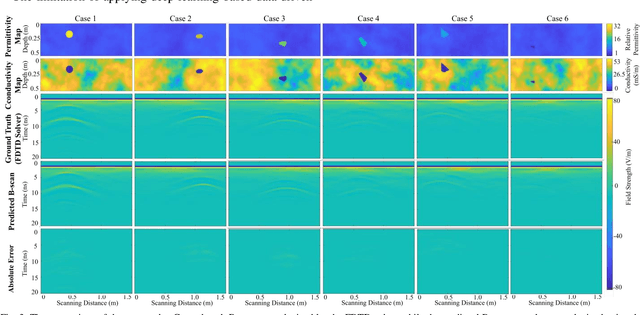
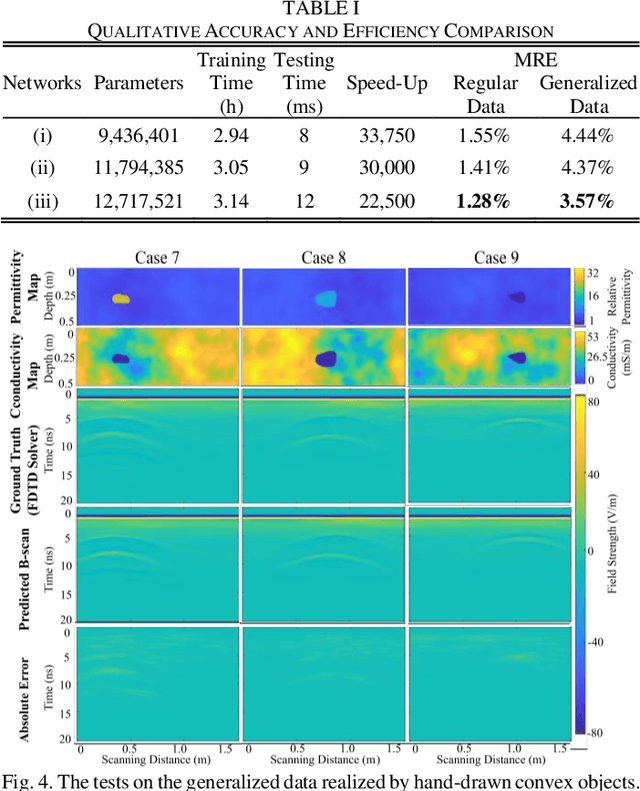
The forward full-wave modeling of ground-penetrating radar (GPR) facilitates the understanding and interpretation of GPR data. Traditional forward solvers require excessive computational resources, especially when their repetitive executions are needed in signal processing and/or machine learning algorithms for GPR data inversion. To alleviate the computational burden, a deep learning-based 2D GPR forward solver is proposed to predict the GPR B-scans of subsurface objects buried in the heterogeneous soil. The proposed solver is constructed as a bimodal encoder-decoder neural network. Two encoders followed by an adaptive feature fusion module are designed to extract informative features from the subsurface permittivity and conductivity maps. The decoder subsequently constructs the B-scans from the fused feature representations. To enhance the network's generalization capability, transfer learning is employed to fine-tune the network for new scenarios vastly different from those in training set. Numerical results show that the proposed solver achieves a mean relative error of 1.28%. For predicting the B-scan of one subsurface object, the proposed solver requires 12 milliseconds, which is 22,500x less than the time required by a classical physics-based solver.
Accurate Tree Roots Positioning and Sizing over Undulated Ground Surfaces by Common Offset GPR Measurements
May 27, 2022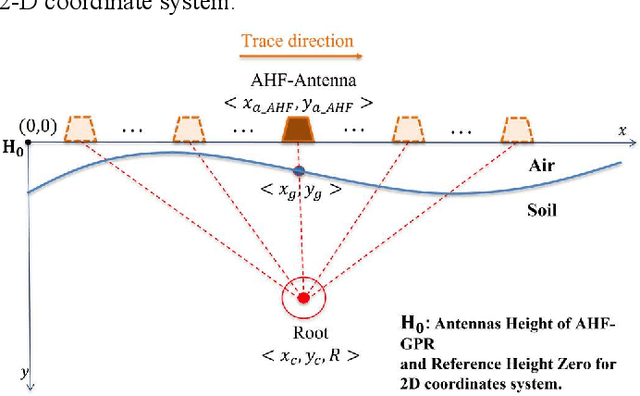
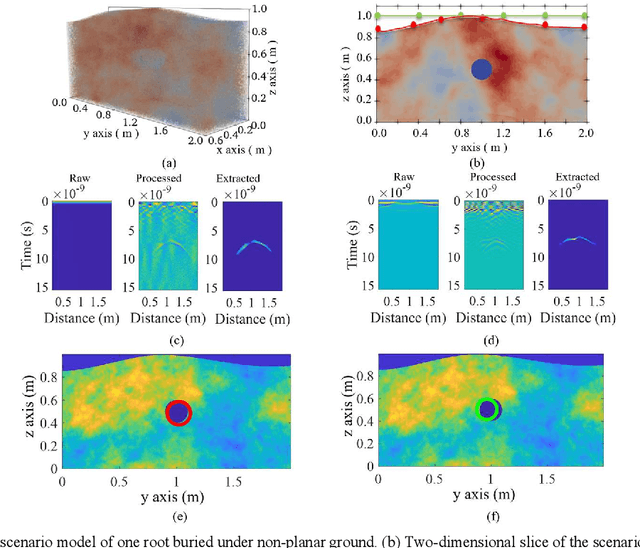
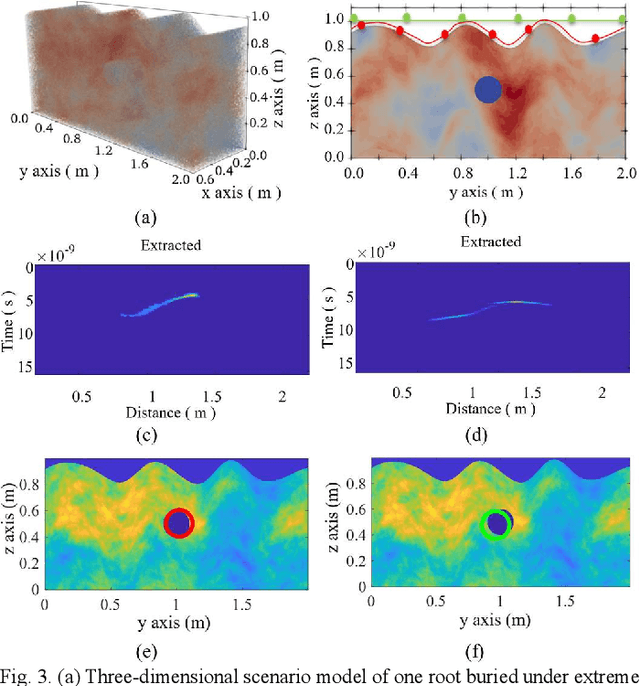
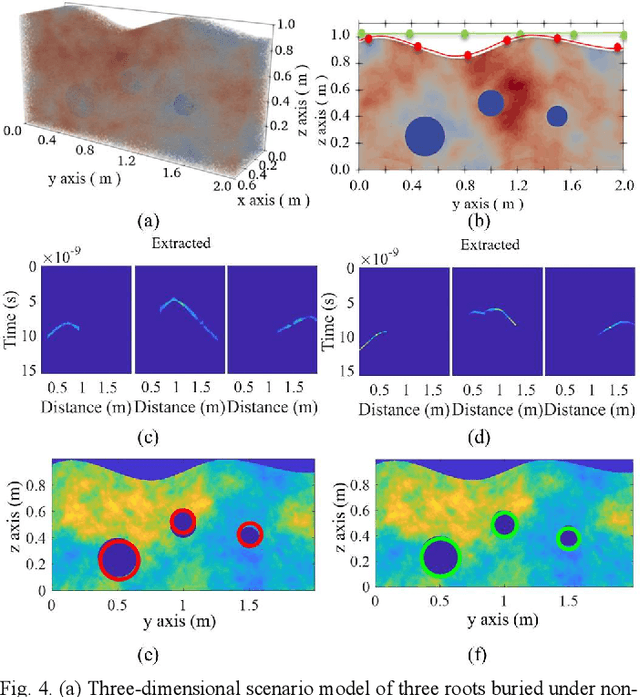
Tree roots detection is a popular application of the Ground-penetrating radar (GPR). Normally, the ground surface above the tree roots is assumed to be flat, and standard processing methods based on hyperbolic fitting are applied to the hyperbolae reflection patterns of tree roots for detection purposes. When the surface of the land is undulating (not flat), these typical hyperbolic fitting methods becomes inaccurate. This is because, the reflection patterns change with the uneven ground surfaces. When the soil surface is not flat, it is inaccurate to use the peak point of an asymmetric reflection pattern to identify the depth and horizontal position of the underground target. The reflection patterns of the complex shapes due to extreme surface variations results in analysis difficulties. Furthermore, when multiple objects are buried under an undulating ground, it is hard to judge their relative positions based on a B-scan that assumes a flat ground. In this paper, a roots fitting method based on electromagnetic waves (EM) travel time analysis is proposed to take into consideration the realistic undulating ground surface. A wheel-based (WB) GPR and an antenna-height-fixed (AHF) GPR System are presented, and their corresponding fitting models are proposed. The effectiveness of the proposed method is demonstrated and validated through numerical examples and field experiments.
Dual-Cross-Polarized GPR Measurement Method for Detection and Orientation Estimation of Shallowly Buried Elongated Object
May 17, 2022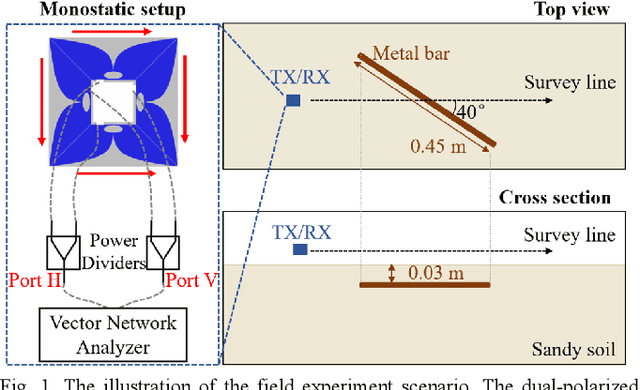
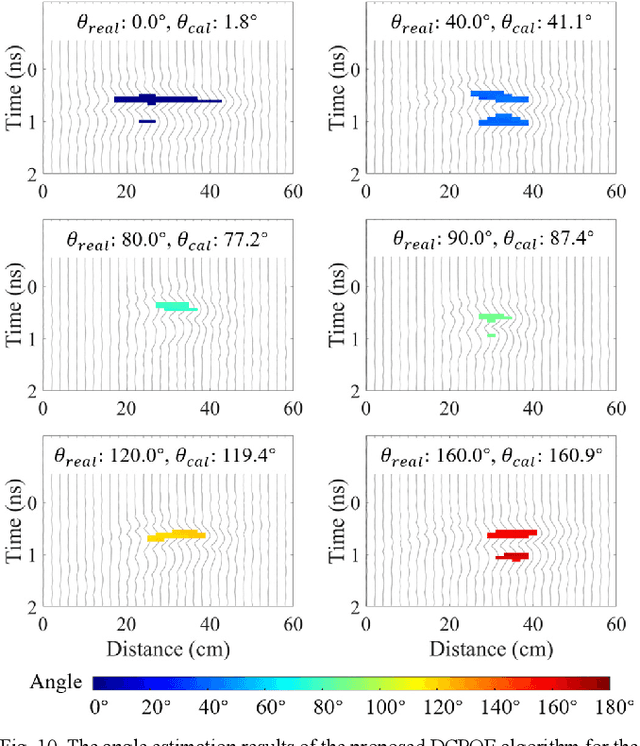
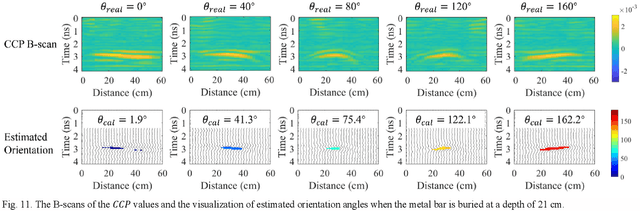
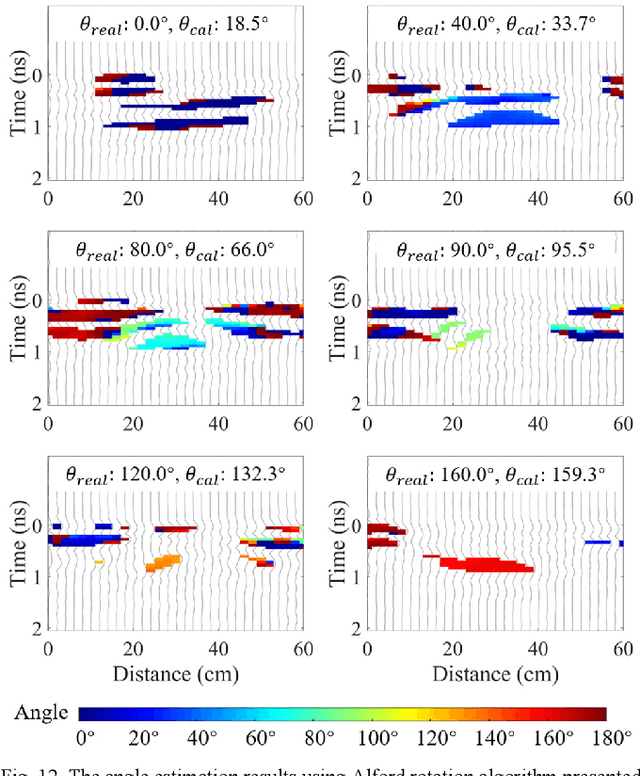
Detecting a shallowly buried and elongated object and estimating its orientation using a commonly adopted co-polarized GPR system is challenging due to the presence of strong ground clutter that masks the target reflection. A cross-polarized configuration can be used to suppress ground clutter and reveal the object reflection, but it suffers from inconsistent detection capability which significantly varies with different object orientations. To address this issue, we propose a dual-cross-polarized detection (DCPD) method which utilizes two cross-polarized antennas with a special arrangement to detect the object. The signals reflected by the object and collected by the two antennas are combined in a rotationally invariant manner to ensure both effective ground clutter suppression and consistent detection irrespective of the object orientation. In addition, we present a dual-cross-polarized orientation estimation (DCPOE) algorithm to estimate the object orientation from the two cross-polarized data. The proposed DCPOE algorithm is less affected by environmental noise and performs robust and accurate azimuth angle estimation. The effectiveness of the proposed techniques in the detection and orientation estimation and their advantages over the existing method have been demonstrated using experimental data. Comparison results show that the maximum and average errors are 22.3{\deg} and 10.9{\deg} for the Alford rotation algorithm, while those are 4.9{\deg} and 1.8{\deg} for the proposed DCPOE algorithm in the demonstrated shallowly buried object cases. The proposed techniques can be unified in a framework to facilitate the investigation and mapping of shallowly buried and elongated targets.
DMRF-UNet: A Two-Stage Deep Learning Scheme for GPR Data Inversion under Heterogeneous Soil Conditions
May 16, 2022
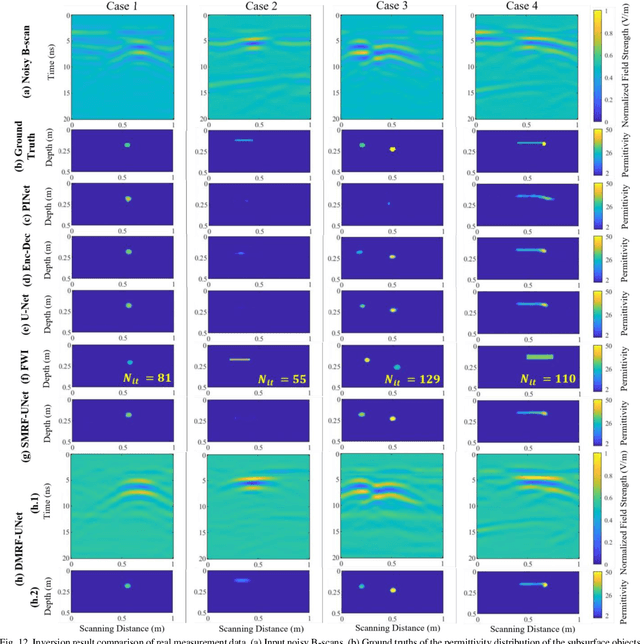

Traditional ground-penetrating radar (GPR) data inversion leverages iterative algorithms which suffer from high computation costs and low accuracy when applied to complex subsurface scenarios. Existing deep learning-based methods focus on the ideal homogeneous subsurface environments and ignore the interference due to clutters and noise in real-world heterogeneous environments. To address these issues, a two-stage deep neural network (DNN), called DMRF-UNet, is proposed to reconstruct the permittivity distributions of subsurface objects from GPR B-scans under heterogeneous soil conditions. In the first stage, a U-shape DNN with multi-receptive-field convolutions (MRF-UNet1) is built to remove the clutters due to inhomogeneity of the heterogeneous soil. Then the denoised B-scan from the MRF-UNet1 is combined with the noisy B-scan to be inputted to the DNN in the second stage (MRF-UNet2). The MRF-UNet2 learns the inverse mapping relationship and reconstructs the permittivity distribution of subsurface objects. To avoid information loss, an end-to-end training method combining the loss functions of two stages is introduced. A wide range of subsurface heterogeneous scenarios and B-scans are generated to evaluate the inversion performance. The test results in the numerical experiment and the real measurement show that the proposed network reconstructs the permittivities, shapes, sizes, and locations of subsurface objects with high accuracy. The comparison with existing methods demonstrates the superiority of the proposed methodology for the inversion under heterogeneous soil conditions.
DeeptDCS: Deep Learning-Based Estimation of Currents Induced During Transcranial Direct Current Stimulation
May 04, 2022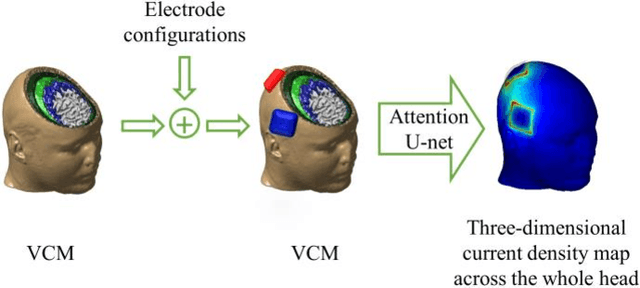
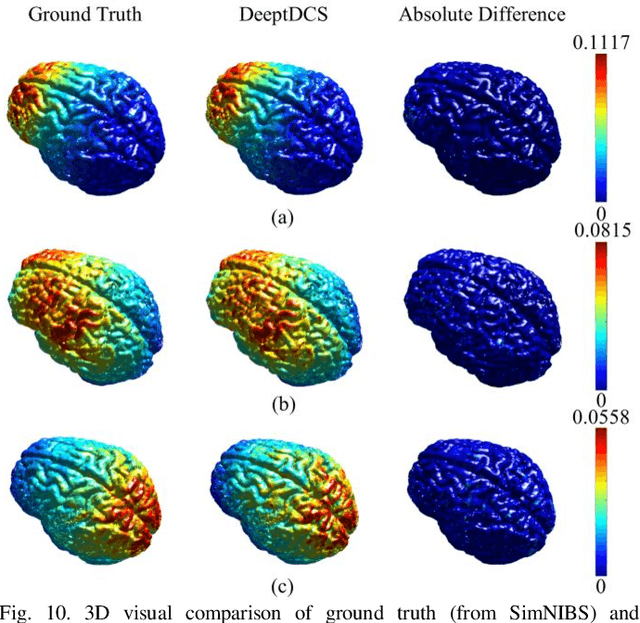
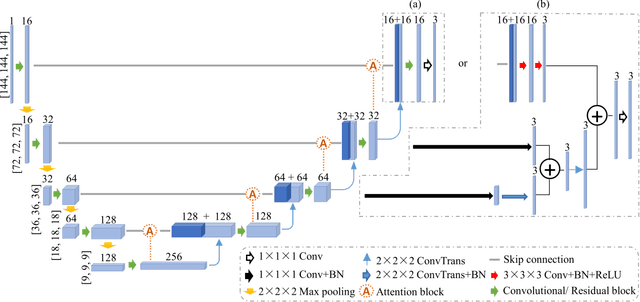
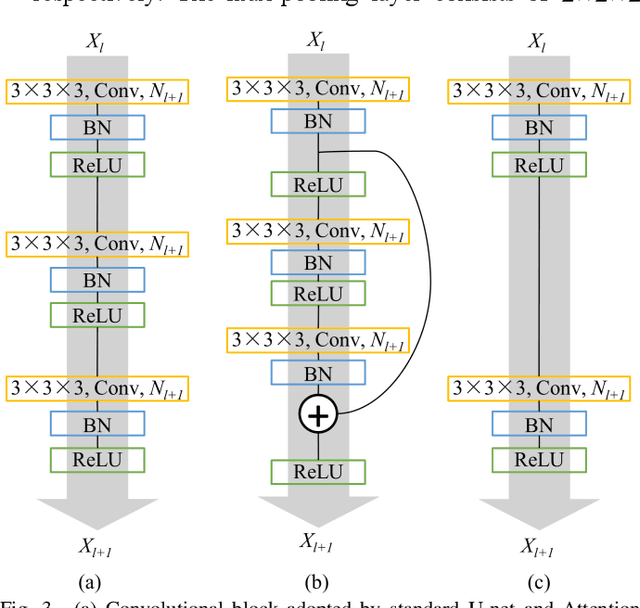
Objective: Transcranial direct current stimulation (tDCS) is a non-invasive brain stimulation technique used to generate conduction currents in the head and disrupt brain functions. To rapidly evaluate the tDCS-induced current density in near real-time, this paper proposes a deep learning-based emulator, named DeeptDCS. Methods: The emulator leverages Attention U-net taking the volume conductor models (VCMs) of head tissues as inputs and outputting the three-dimensional current density distribution across the entire head. The electrode configurations are also incorporated into VCMs without increasing the number of input channels; this enables the straightforward incorporation of the non-parametric features of electrodes (e.g., thickness, shape, size, and position) in the training and testing of the proposed emulator. Results: Attention U-net outperforms standard U-net and its other three variants (Residual U-net, Attention Residual U-net, and Multi-scale Residual U-net) in terms of accuracy. The generalization ability of DeeptDCS to non-trained electrode positions can be greatly enhanced through fine-tuning the model. The computational time required by one emulation via DeeptDCS is a fraction of a second. Conclusion: DeeptDCS is at least two orders of magnitudes faster than a physics-based open-source simulator, while providing satisfactorily accurate results. Significance: The high computational efficiency permits the use of DeeptDCS in applications requiring its repetitive execution, such as uncertainty quantification and optimization studies of tDCS.
SFCW GPR tree roots detection enhancement by time frequency analysis in tropical areas
Apr 06, 2022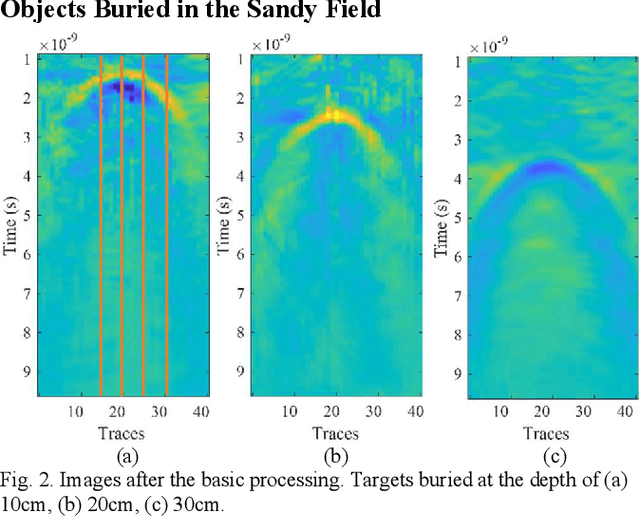


Accurate monitoring of tree roots using ground penetrating radar (GPR) is very useful in assessing the trees health. In high moisture tropical areas such as Singapore, tree fall due to root rot can cause loss of lives and properties. The tropical complex soil characteristics due to the high moisture content tends to affect penetration depth of the signal. This limits the depth range of the GPR. Typically, a wide band signal is used to increase the penetration depth and to improve the resolution of the GPR. However, this broad band frequency tends to be noisy and selective frequency filtering is required for noise reduction. Therefore, in this paper, we adapt the stepped frequency continuous wave (SFCW) GPR and propose the use of a Joint time frequency analysis (JTFA) method called short time Fourier transform (STFT), to reduce noise and enhance tree root detection. The proposed methodology is illustrated and tested with controlled experiments and real tree roots testing. The results show promising prospects of the method for tree roots detection in tropical areas.