 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Migration-Assisted Deep Learning Scheme for Imaging Defects Inside Cylindrical Structures via GPR: A Case Study for Tree Trunks
Feb 05, 2026Ground-penetrating radar (GPR) has emerged as a prominent tool for imaging internal defects in cylindrical structures, such as columns, utility poles, and tree trunks. However, accurately reconstructing both the shape and permittivity of the defects inside cylindrical structures remains challenging due to complex wave scattering phenomena and the limited accuracy of the existing signal processing and deep learning techniques. To address these issues, this study proposes a migration-assisted deep learning scheme for reconstructing the shape and permittivity of defects within cylindrical structures. The proposed scheme involves three stages of GPR data processing. First, a dual-permittivity estimation network extracts the permittivity values of the defect and the cylindrical structure, the latter of which is estimated with the help of a novel structural similarity index measure-based autofocusing technique. Second, a modified Kirchhoff migration incorporating the extracted permittivity of the cylindrical structure maps the signals reflected from the defect to the imaging domain. Third, a shape reconstruction network processes the migrated image to recover the precise shape of the defect. The image of the interior defect is finally obtained by combining the reconstructed shape and extracted permittivity of the defect. The proposed scheme is validated using both synthetic and experimental data from a laboratory trunk model and real tree trunk samples. Comparative results show superior performance over existing deep learning methods, while generalization tests on live trees confirm its feasibility for in-field deployment. The underlying principle can further be applied to other circumferential GPR imaging scenarios. The code and database are available at: https://github.com/jwqian54/Migration-Assisted-DL.
A Deep Learning-Augmented Stand-off Radar Scheme for Rapidly Detecting Tree Defects
Jun 08, 2024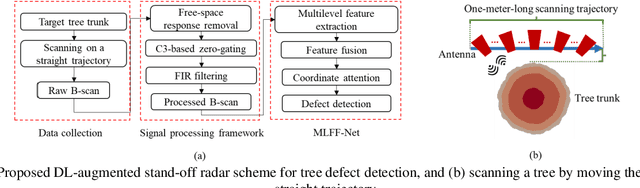
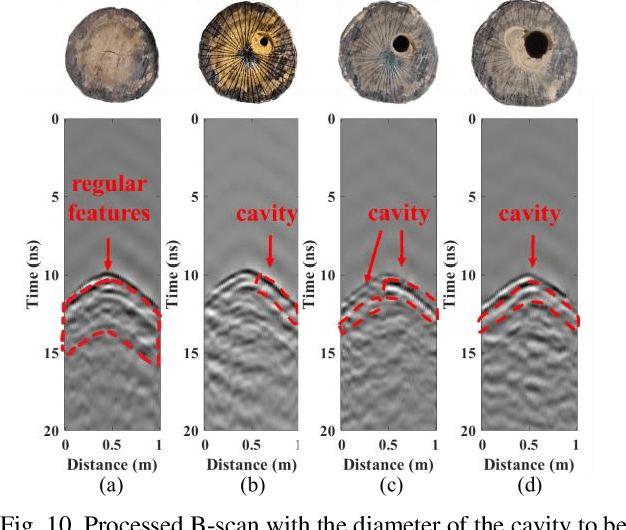
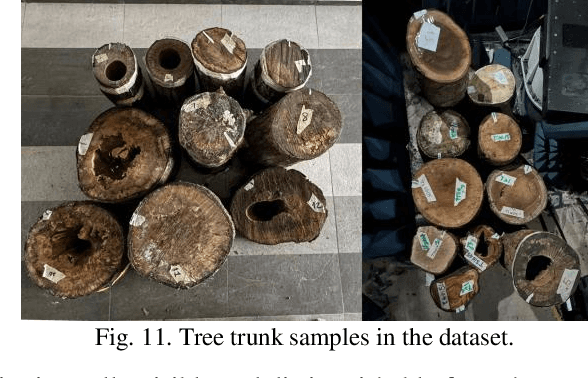
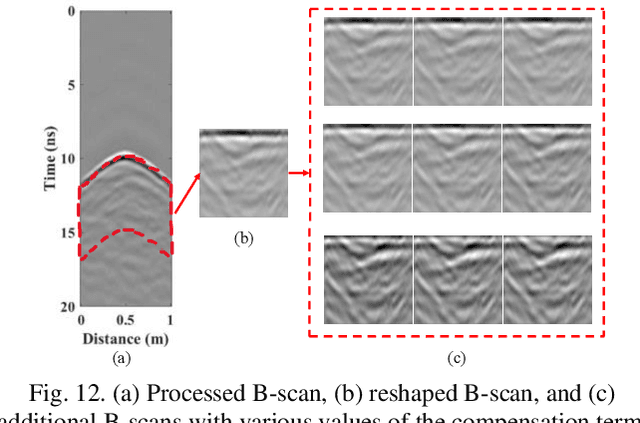
Tree defect detection is crucial for the structural health screening of trees. Existing nondestructive testing (NDT) techniques for tree defect detection require time-consuming and labor-intensive measurement campaigns. This discourages their application for the routine structural health screening of whole populations of managed urban trees. To address this issue, this study proposes a deep-learning augmented stand-off radar scheme for contactless scanning of tree trunks and rapid detection of tree defects. In this scheme, the antenna is moved along a straight trajectory at a distance from the tree trunk to obtain the trunk's B-scan. The obtained raw B-scan is then processed by a signal-processing framework specifically developed for revealing the scattering signatures of defects in B-scan, which achieves a 30 dB and 22 dB increase in the signal-to-clutter and noise ratio of the measurement data of tree trunk samples and living trees, respectively. Finally, the processed B-scan is input into a multilevel feature fusion neural network particularly designed for extracting the signature of the defect in the processed B-scan in real time. The developed scheme's applications to the detection of defects in real fresh-cut tree trunks show that the stand-off radar scheme can detect tree defects with 96% accuracy. This stand-off radar scheme is the first contactless NDT technique for tree defect detection while operated on a straight trajectory and potentially can be integrated into the routine tree inspection workflow which is part of urban tree management.
3DInvNet: A Deep Learning-Based 3D Ground-Penetrating Radar Data Inversion
May 09, 2023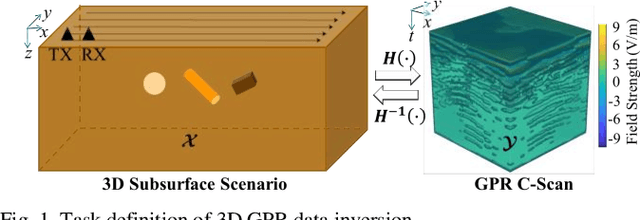

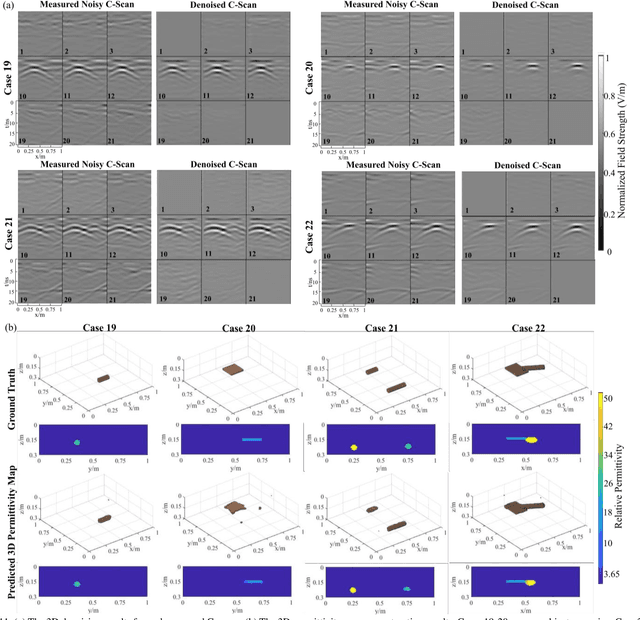
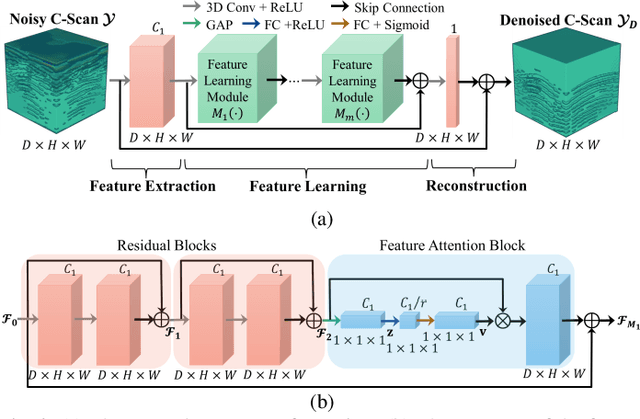
The reconstruction of the 3D permittivity map from ground-penetrating radar (GPR) data is of great importance for mapping subsurface environments and inspecting underground structural integrity. Traditional iterative 3D reconstruction algorithms suffer from strong non-linearity, ill-posedness, and high computational cost. To tackle these issues, a 3D deep learning scheme, called 3DInvNet, is proposed to reconstruct 3D permittivity maps from GPR C-scans. The proposed scheme leverages a prior 3D convolutional neural network with a feature attention mechanism to suppress the noise in the C-scans due to subsurface heterogeneous soil environments. Then a 3D U-shaped encoder-decoder network with multi-scale feature aggregation modules is designed to establish the optimal inverse mapping from the denoised C-scans to 3D permittivity maps. Furthermore, a three-step separate learning strategy is employed to pre-train and fine-tune the networks. The proposed scheme is applied to numerical simulation as well as real measurement data. The quantitative and qualitative results show the network capability, generalizability, and robustness in denoising GPR C-scans and reconstructing 3D permittivity maps of subsurface objects.
A Deep Learning-Based GPR Forward Solver for Predicting B-Scans of Subsurface Objects
Jul 13, 2022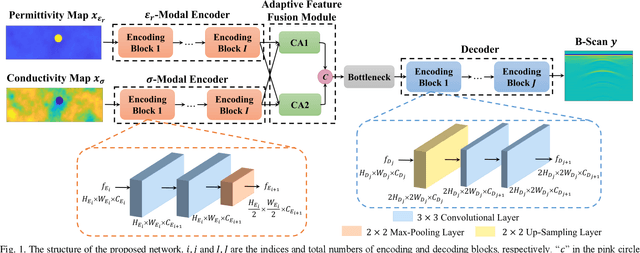
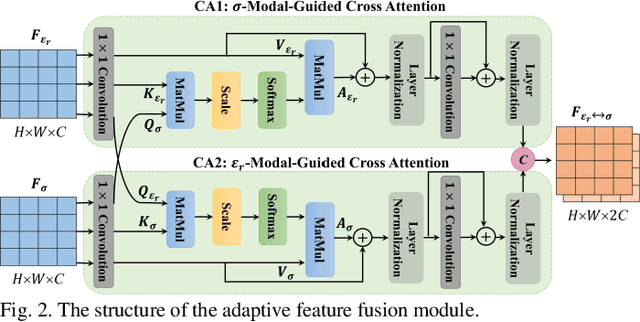
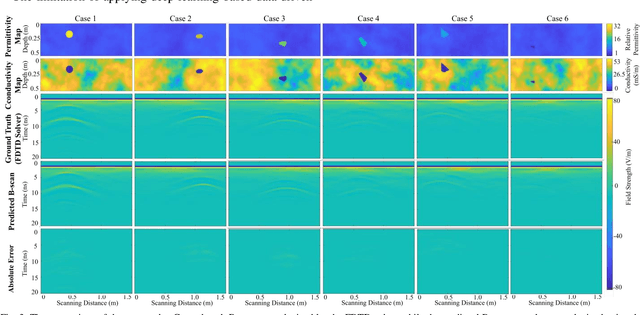
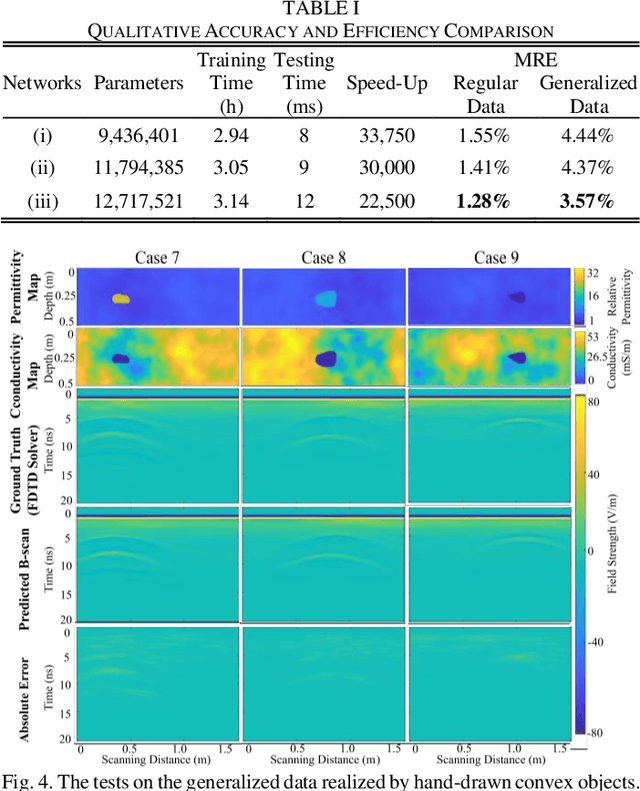
The forward full-wave modeling of ground-penetrating radar (GPR) facilitates the understanding and interpretation of GPR data. Traditional forward solvers require excessive computational resources, especially when their repetitive executions are needed in signal processing and/or machine learning algorithms for GPR data inversion. To alleviate the computational burden, a deep learning-based 2D GPR forward solver is proposed to predict the GPR B-scans of subsurface objects buried in the heterogeneous soil. The proposed solver is constructed as a bimodal encoder-decoder neural network. Two encoders followed by an adaptive feature fusion module are designed to extract informative features from the subsurface permittivity and conductivity maps. The decoder subsequently constructs the B-scans from the fused feature representations. To enhance the network's generalization capability, transfer learning is employed to fine-tune the network for new scenarios vastly different from those in training set. Numerical results show that the proposed solver achieves a mean relative error of 1.28%. For predicting the B-scan of one subsurface object, the proposed solver requires 12 milliseconds, which is 22,500x less than the time required by a classical physics-based solver.
DMRF-UNet: A Two-Stage Deep Learning Scheme for GPR Data Inversion under Heterogeneous Soil Conditions
May 16, 2022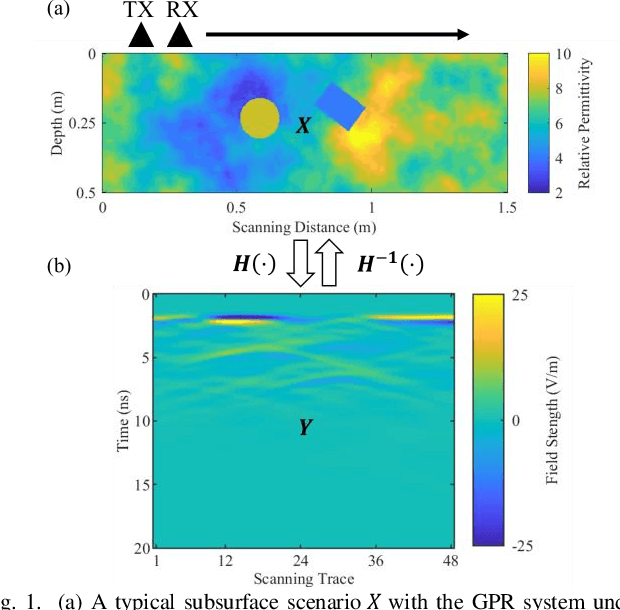
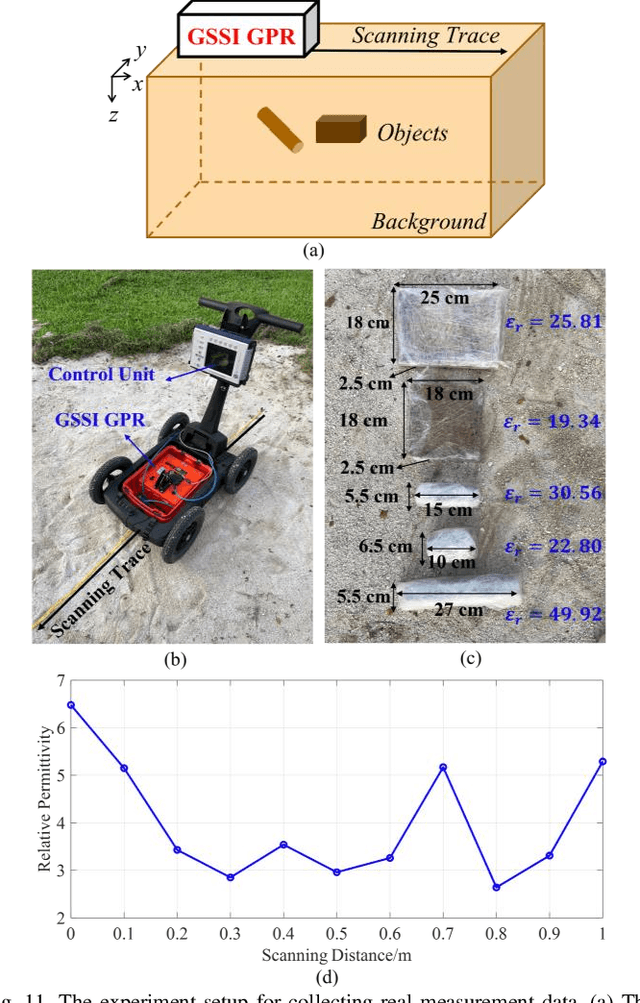
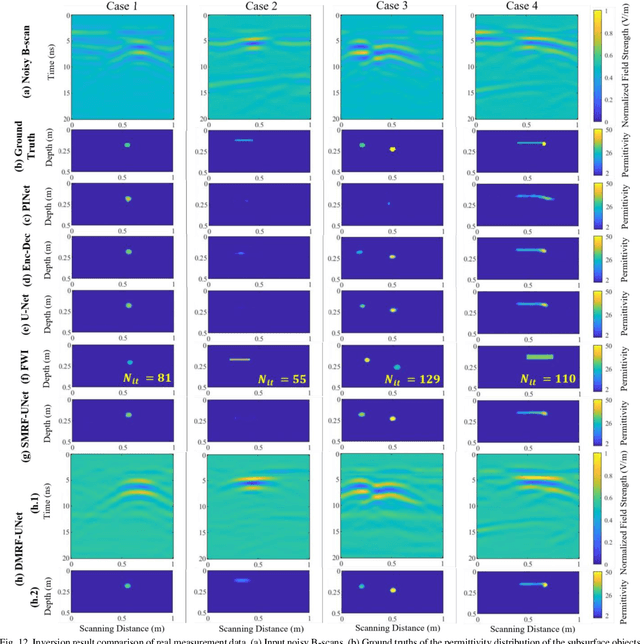

Traditional ground-penetrating radar (GPR) data inversion leverages iterative algorithms which suffer from high computation costs and low accuracy when applied to complex subsurface scenarios. Existing deep learning-based methods focus on the ideal homogeneous subsurface environments and ignore the interference due to clutters and noise in real-world heterogeneous environments. To address these issues, a two-stage deep neural network (DNN), called DMRF-UNet, is proposed to reconstruct the permittivity distributions of subsurface objects from GPR B-scans under heterogeneous soil conditions. In the first stage, a U-shape DNN with multi-receptive-field convolutions (MRF-UNet1) is built to remove the clutters due to inhomogeneity of the heterogeneous soil. Then the denoised B-scan from the MRF-UNet1 is combined with the noisy B-scan to be inputted to the DNN in the second stage (MRF-UNet2). The MRF-UNet2 learns the inverse mapping relationship and reconstructs the permittivity distribution of subsurface objects. To avoid information loss, an end-to-end training method combining the loss functions of two stages is introduced. A wide range of subsurface heterogeneous scenarios and B-scans are generated to evaluate the inversion performance. The test results in the numerical experiment and the real measurement show that the proposed network reconstructs the permittivities, shapes, sizes, and locations of subsurface objects with high accuracy. The comparison with existing methods demonstrates the superiority of the proposed methodology for the inversion under heterogeneous soil conditions.
Estimating Parameters of the Tree Root in Heterogeneous Soil Environments via Mask-Guided Multi-Polarimetric Integration Neural Network
Dec 27, 2021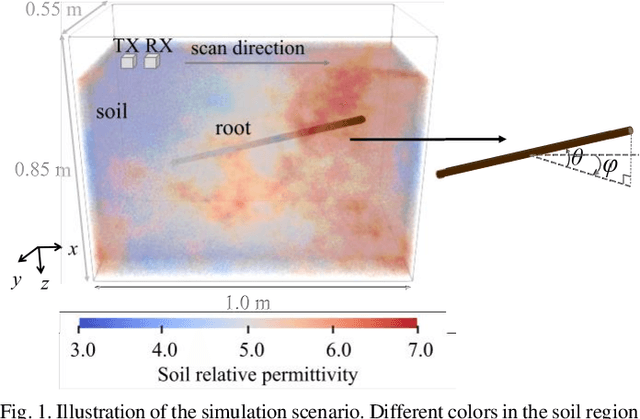
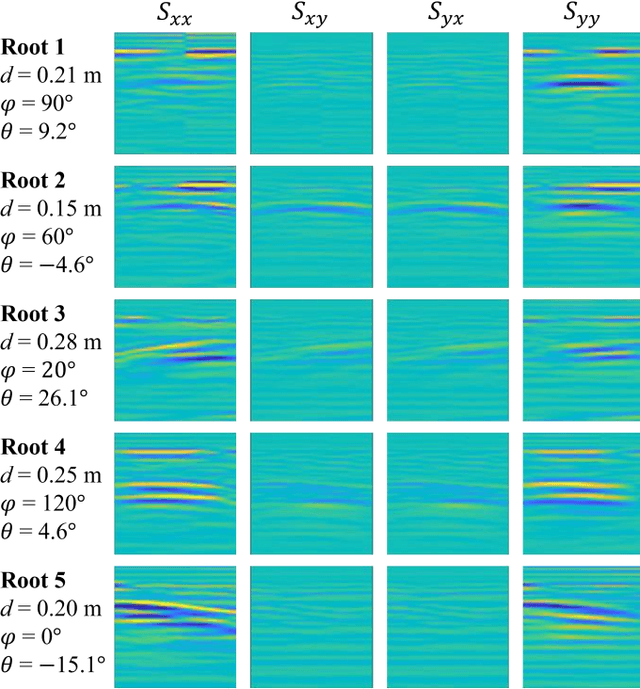
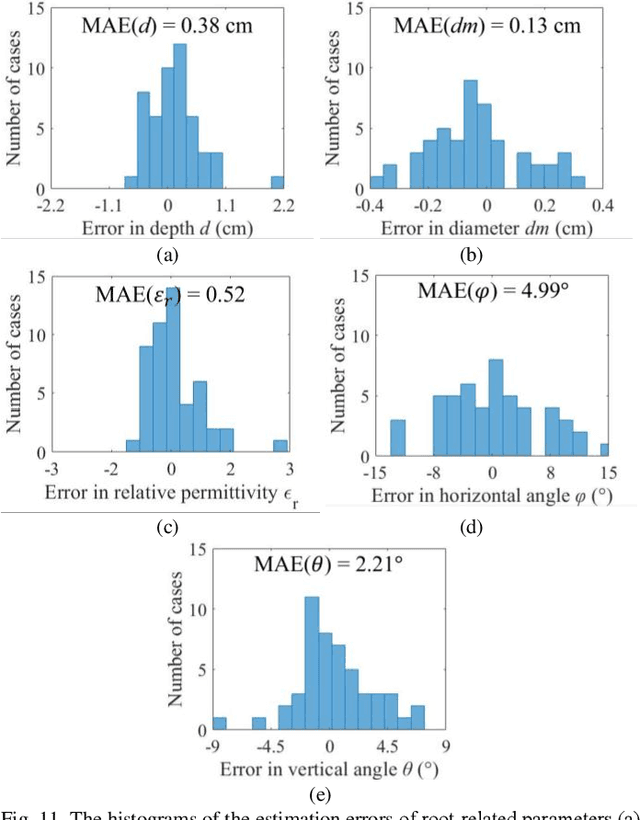
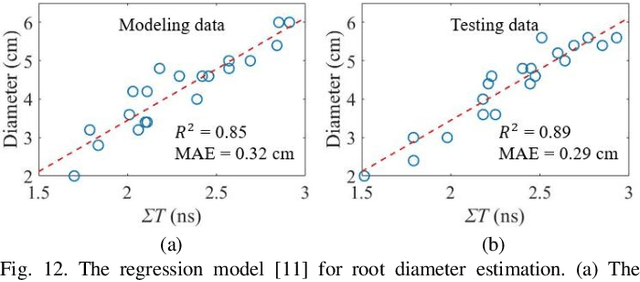
Ground-penetrating radar (GPR) has been used as a non-destructive tool for tree root inspection. Estimating root-related parameters from GPR radargrams greatly facilitates root health monitoring and imaging. However, the task of estimating root-related parameters is challenging as the root reflection is a complex function of multiple root parameters and root orientations. Existing methods can only estimate a single root parameter at a time without considering the influence of other parameters and root orientations, resulting in limited estimation accuracy under different root conditions. In addition, soil heterogeneity introduces clutter in GPR radargrams, making the data processing and interpretation even harder. To address these issues, a novel neural network architecture, called mask-guided multi-polarimetric integration neural network (MMI-Net), is proposed to automatically and simultaneously estimate multiple root-related parameters in heterogeneous soil environments. The MMI-Net includes two sub-networks: a MaskNet that predicts a mask to highlight the root reflection area to eliminate interfering environmental clutter, and a ParaNet that uses the predicted mask as guidance to integrate, extract, and emphasize informative features in multi-polarimetric radargrams for accurate estimation of five key root-related parameters. The parameters include the root depth, diameter, relative permittivity, horizontal and vertical orientation angles. Experimental results demonstrate that the proposed MMI-Net achieves high estimation accuracy in these root-related parameters. This is the first work that takes the combined contributions of root parameters and spatial orientations into account and simultaneously estimates multiple root-related parameters. The data and code implemented in the paper can be found at https://haihan-sun.github.io/GPR.html.