 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DInvNet: A Deep Learning-Based 3D Ground-Penetrating Radar Data Inversion
Paper and Code
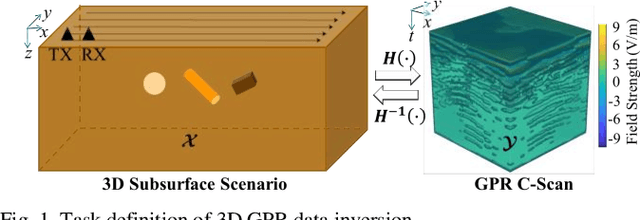

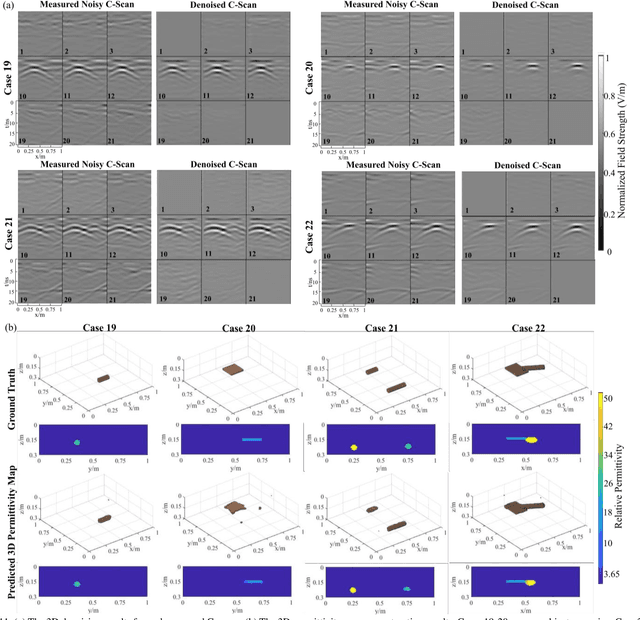
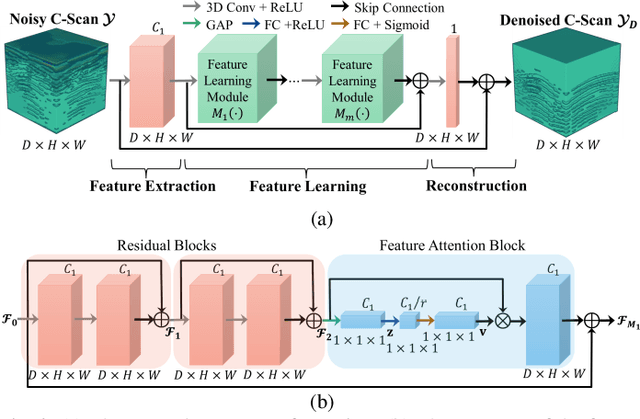
The reconstruction of the 3D permittivity map from ground-penetrating radar (GPR) data is of great importance for mapping subsurface environments and inspecting underground structural integrity. Traditional iterative 3D reconstruction algorithms suffer from strong non-linearity, ill-posedness, and high computational cost. To tackle these issues, a 3D deep learning scheme, called 3DInvNet, is proposed to reconstruct 3D permittivity maps from GPR C-scans. The proposed scheme leverages a prior 3D convolutional neural network with a feature attention mechanism to suppress the noise in the C-scans due to subsurface heterogeneous soil environments. Then a 3D U-shaped encoder-decoder network with multi-scale feature aggregation modules is designed to establish the optimal inverse mapping from the denoised C-scans to 3D permittivity maps. Furthermore, a three-step separate learning strategy is employed to pre-train and fine-tune the networks. The proposed scheme is applied to numerical simulation as well as real measurement data. The quantitative and qualitative results show the network capability, generalizability, and robustness in denoising GPR C-scans and reconstructing 3D permittivity maps of subsurface objects.