 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMindCraft: Revolutionizing Education through AI-Powered Personalized Learning and Mentorship for Rural India
Feb 09, 2025MindCraft is a modern platform designed to revolutionize education in rural India by leveraging Artificial Intelligence (AI) to create personalized learning experiences, provide mentorship, and foster resource-sharing. In a country where access to quality education is deeply influenced by geography and socio economic status, rural students often face significant barriers in their educational journeys. MindCraft aims to bridge this gap by utilizing AI to create tailored learning paths, connect students with mentors, and enable a collaborative network of educational resources that transcends both physical and digital divides. This paper explores the challenges faced by rural students, the transformative potential of AI, and how MindCraft offers a scalable, sustainable solution for equitable education system. By focusing on inclusivity, personalized learning, and mentorship, MindCraft seeks to empower rural students, equipping them with the skills, knowledge, and opportunities needed to thrive in an increasingly digital world. Ultimately, MindCraft envisions a future in which technology not only bridges educational gaps but also becomes the driving force for a more inclusive and empowered society.
Syn2Real Domain Generalization for Underwater Mine-like Object Detection Using Side-Scan Sonar
Oct 16, 2024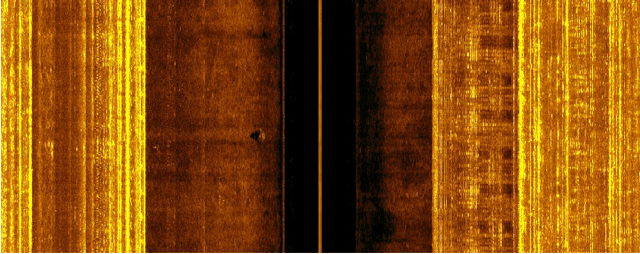
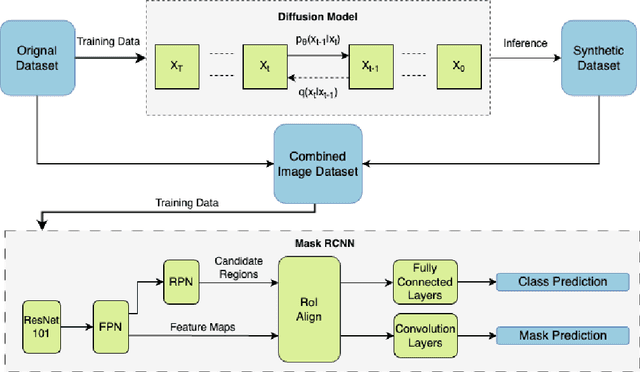
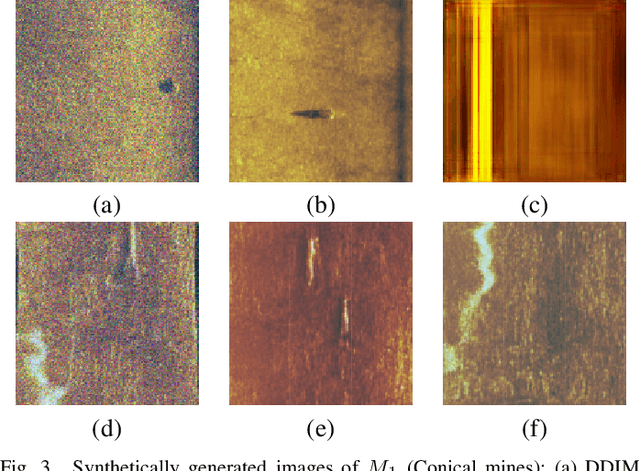
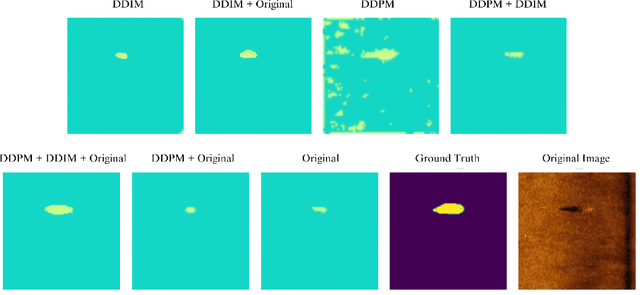
Underwater mine detection with deep learning suffers from limitations due to the scarcity of real-world data. This scarcity leads to overfitting, where models perform well on training data but poorly on unseen data. This paper proposes a Syn2Real (Synthetic to Real) domain generalization approach using diffusion models to address this challenge. We demonstrate that synthetic data generated with noise by DDPM and DDIM models, even if not perfectly realistic, can effectively augment real-world samples for training. The residual noise in the final sampled images improves the model's ability to generalize to real-world data with inherent noise and high variation. The baseline Mask-RCNN model when trained on a combination of synthetic and original training datasets, exhibited approximately a 60% increase in Average Precision (AP) compared to being trained solely on the original training data. This significant improvement highlights the potential of Syn2Real domain generalization for underwater mine detection tasks.
Preliminary Evaluation of an Ultrasound-Guided Robotic System for Autonomous Percutaneous Intervention
Oct 14, 2024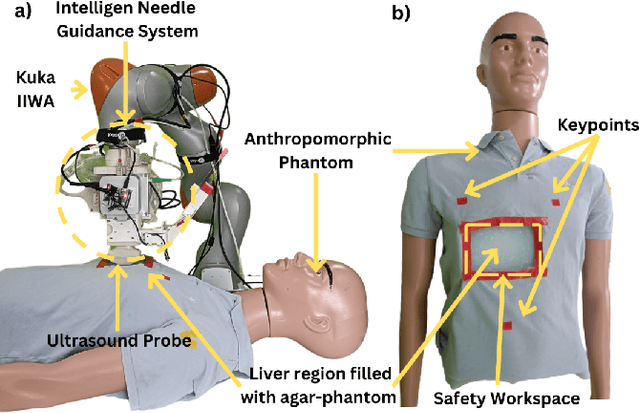
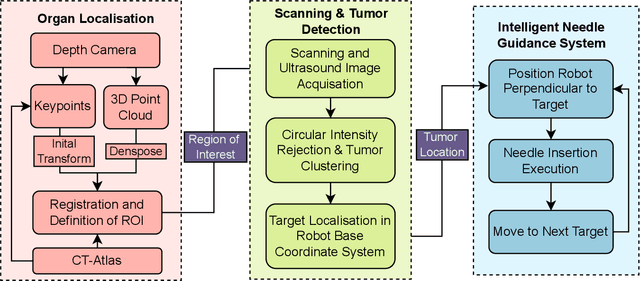
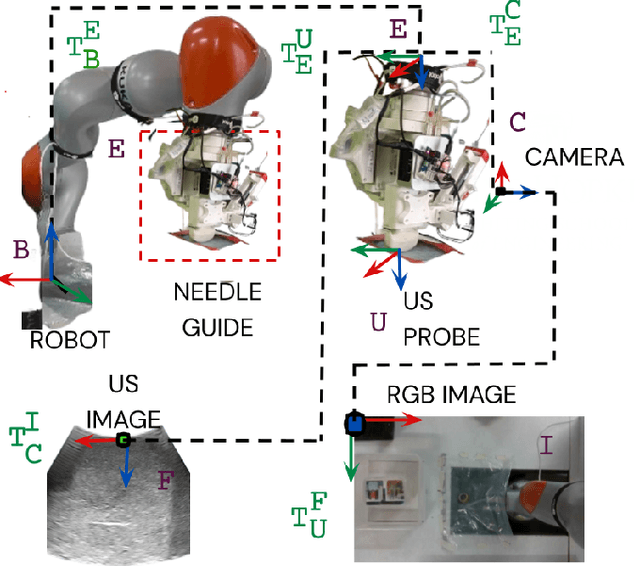
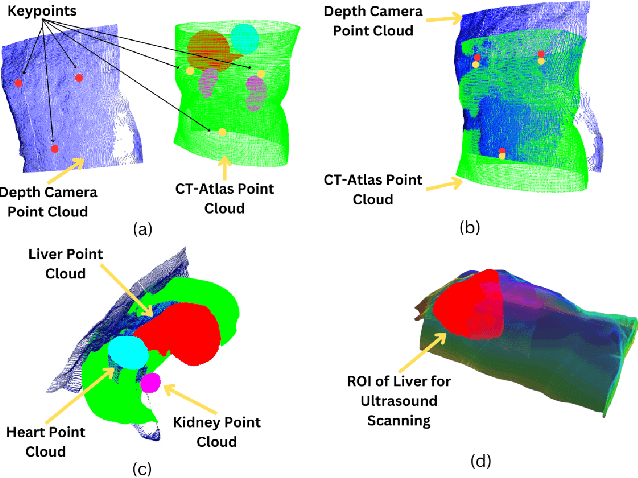
Cancer cases have been rising globally, resulting in nearly 10 million deaths in 2023. Biopsy, crucial for diagnosis, is often performed under ultrasound (US) guidance, demanding precise hand coordination and cognitive decision-making. Robot-assisted interventions have shown improved accuracy in lesion targeting by addressing challenges such as noisy 2D images and maintaining consistent probe-to-surface contact. Recent research has focused on fully autonomous robotic US systems to enable standardized diagnostic procedures and reproducible US-guided therapy. This study presents a fully autonomous system for US-guided needle placement capable of performing end-to-end clinical workflow. The system autonomously: 1) identifies the liver region on the patient's abdomen surface, 2) plans and executes the US scanning path using impedance control, 3) localizes lesions from the US images in real-time, and 4) targets the identified lesions, all without human intervention. This study evaluates both position and impedance-controlled systems. Validation on agar phantoms demonstrated a targeting error of 5.74 +- 2.70 mm, highlighting its potential for accurately targeting tumors larger than 5 mm. Achieved results show its potential for a fully autonomous system for US-guided biopsies.
LOID: Lane Occlusion Inpainting and Detection for Enhanced Autonomous Driving Systems
Aug 17, 2024
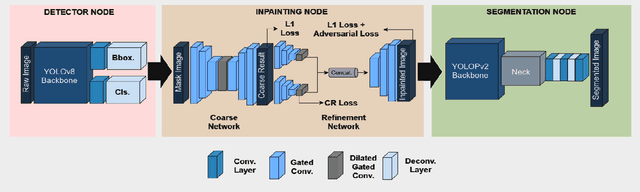
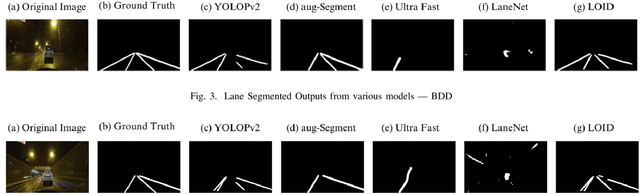
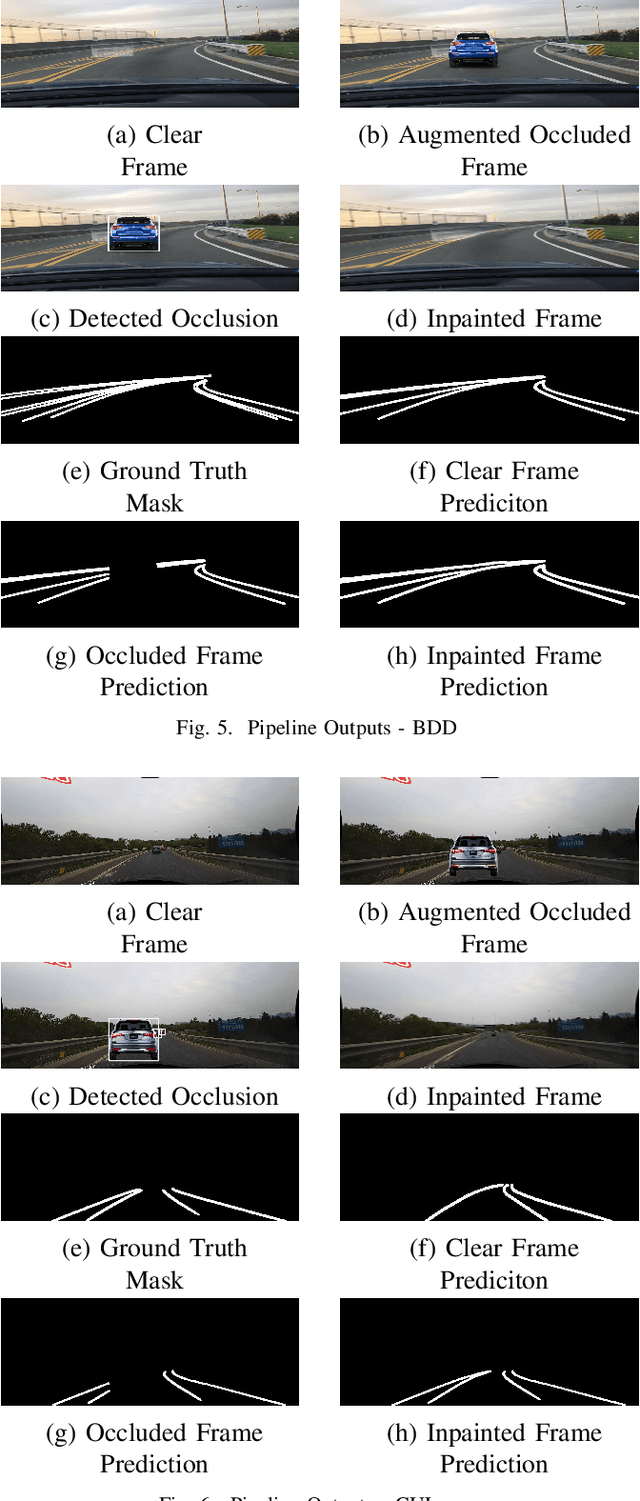
Accurate lane detection is essential for effective path planning and lane following in autonomous driving, especially in scenarios with significant occlusion from vehicles and pedestrians. Existing models often struggle under such conditions, leading to unreliable navigation and safety risks. We propose two innovative approaches to enhance lane detection in these challenging environments, each showing notable improvements over current methods. The first approach aug-Segment improves conventional lane detection models by augmenting the training dataset of CULanes with simulated occlusions and training a segmentation model. This method achieves a 12% improvement over a number of SOTA models on the CULanes dataset, demonstrating that enriched training data can better handle occlusions, however, since this model lacked robustness to certain settings, our main contribution is the second approach, LOID Lane Occlusion Inpainting and Detection. LOID introduces an advanced lane detection network that uses an image processing pipeline to identify and mask occlusions. It then employs inpainting models to reconstruct the road environment in the occluded areas. The enhanced image is processed by a lane detection algorithm, resulting in a 20% & 24% improvement over several SOTA models on the BDDK100 and CULanes datasets respectively, highlighting the effectiveness of this novel technique.