 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLOID: Lane Occlusion Inpainting and Detection for Enhanced Autonomous Driving Systems
Paper and Code
Aug 17, 2024
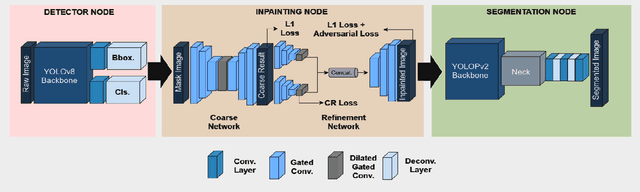
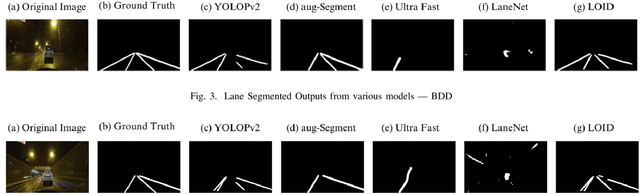
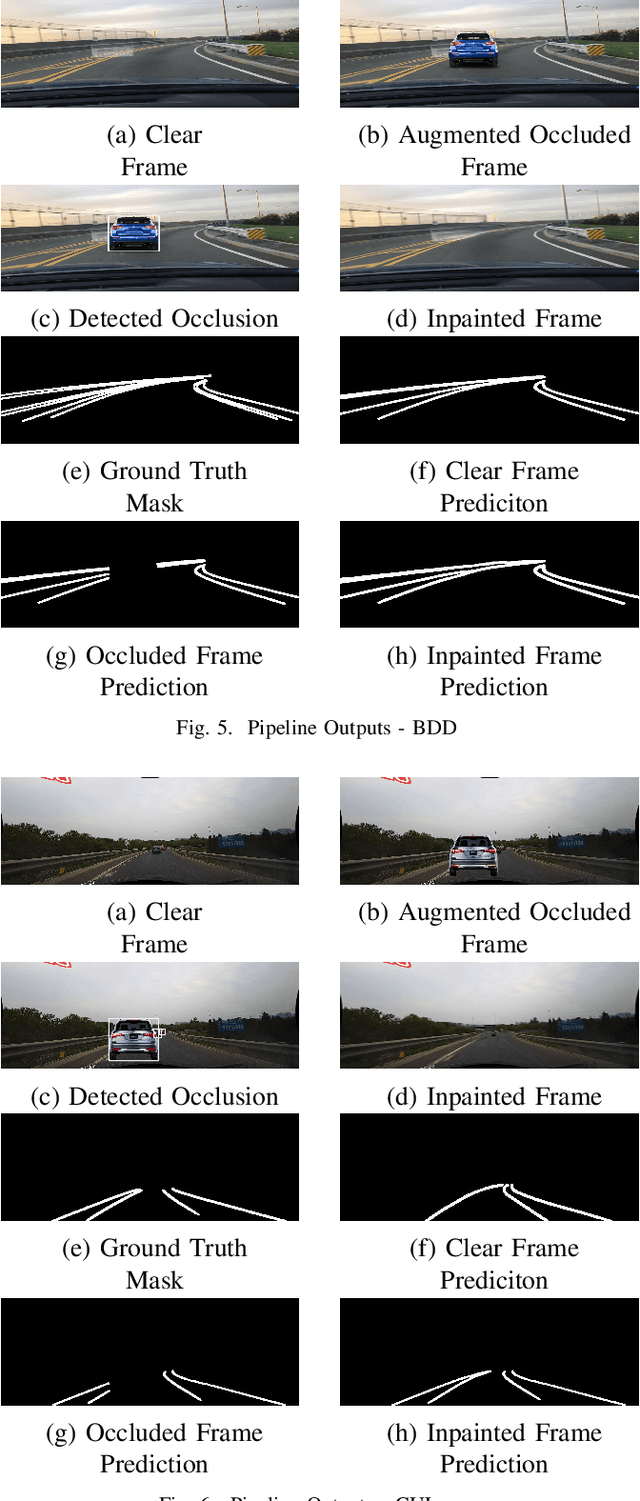
Accurate lane detection is essential for effective path planning and lane following in autonomous driving, especially in scenarios with significant occlusion from vehicles and pedestrians. Existing models often struggle under such conditions, leading to unreliable navigation and safety risks. We propose two innovative approaches to enhance lane detection in these challenging environments, each showing notable improvements over current methods. The first approach aug-Segment improves conventional lane detection models by augmenting the training dataset of CULanes with simulated occlusions and training a segmentation model. This method achieves a 12% improvement over a number of SOTA models on the CULanes dataset, demonstrating that enriched training data can better handle occlusions, however, since this model lacked robustness to certain settings, our main contribution is the second approach, LOID Lane Occlusion Inpainting and Detection. LOID introduces an advanced lane detection network that uses an image processing pipeline to identify and mask occlusions. It then employs inpainting models to reconstruct the road environment in the occluded areas. The enhanced image is processed by a lane detection algorithm, resulting in a 20% & 24% improvement over several SOTA models on the BDDK100 and CULanes datasets respectively, highlighting the effectiveness of this novel technique.