 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreliminary Evaluation of an Ultrasound-Guided Robotic System for Autonomous Percutaneous Intervention
Oct 14, 2024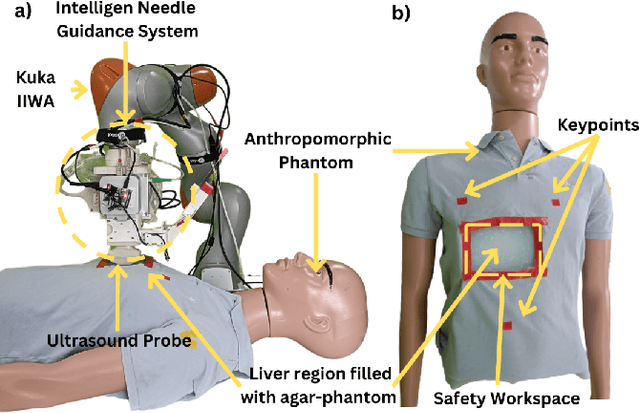
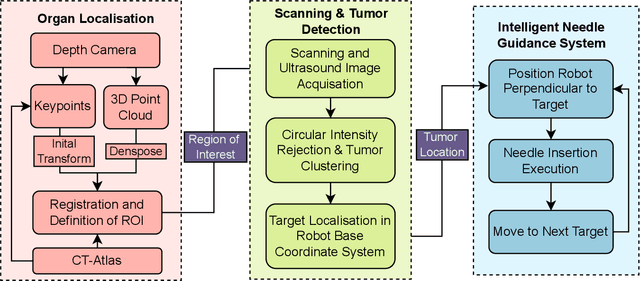
Cancer cases have been rising globally, resulting in nearly 10 million deaths in 2023. Biopsy, crucial for diagnosis, is often performed under ultrasound (US) guidance, demanding precise hand coordination and cognitive decision-making. Robot-assisted interventions have shown improved accuracy in lesion targeting by addressing challenges such as noisy 2D images and maintaining consistent probe-to-surface contact. Recent research has focused on fully autonomous robotic US systems to enable standardized diagnostic procedures and reproducible US-guided therapy. This study presents a fully autonomous system for US-guided needle placement capable of performing end-to-end clinical workflow. The system autonomously: 1) identifies the liver region on the patient's abdomen surface, 2) plans and executes the US scanning path using impedance control, 3) localizes lesions from the US images in real-time, and 4) targets the identified lesions, all without human intervention. This study evaluates both position and impedance-controlled systems. Validation on agar phantoms demonstrated a targeting error of 5.74 +- 2.70 mm, highlighting its potential for accurately targeting tumors larger than 5 mm. Achieved results show its potential for a fully autonomous system for US-guided biopsies.