 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzy Sets Across the Natural Language Generation Pipeline
May 17, 2016
We explore the implications of using fuzzy techniques (mainly those commonly used in the linguistic description/summarization of data discipline) from a natural language generation perspective. For this, we provide an extensive discussion of some general convergence points and an exploration of the relationship between the different tasks involved in the standard NLG system pipeline architecture and the most common fuzzy approaches used in linguistic summarization/description of data, such as fuzzy quantified statements, evaluation criteria or aggregation operators. Each individual discussion is illustrated with a related use case. Recent work made in the context of cross-fertilization of both research fields is also referenced. This paper encompasses general ideas that emerged as part of the PhD thesis "Application of fuzzy sets in data-to-text systems". It does not present a specific application or a formal approach, but rather discusses current high-level issues and potential usages of fuzzy sets (focused on linguistic summarization of data) in natural language generation.
FRULER: Fuzzy Rule Learning through Evolution for Regression
Jul 17, 2015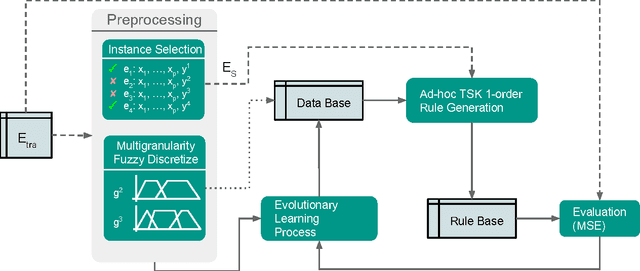
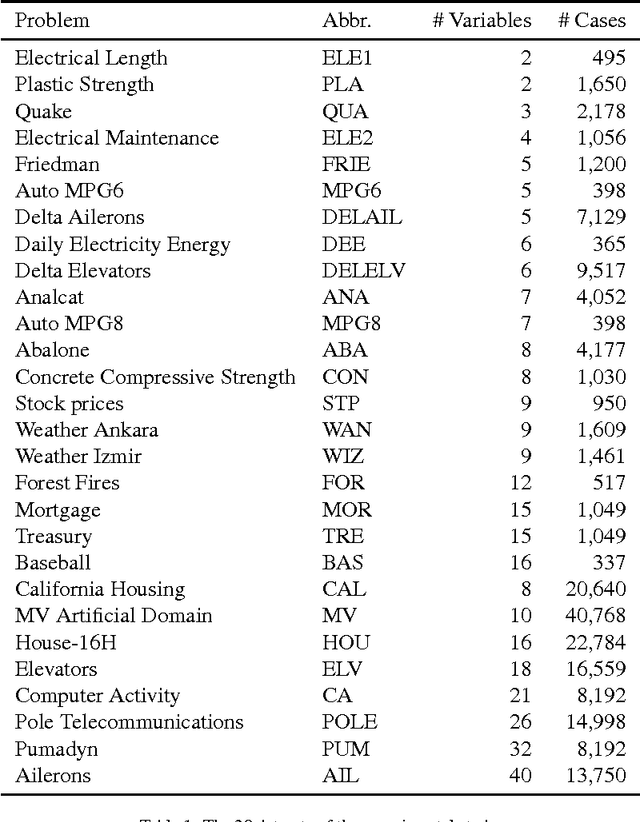
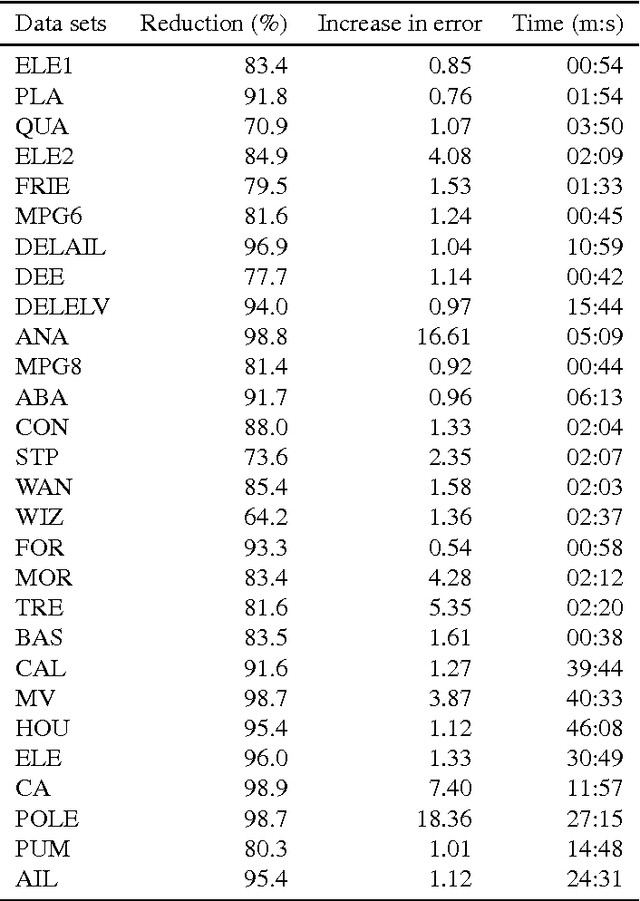
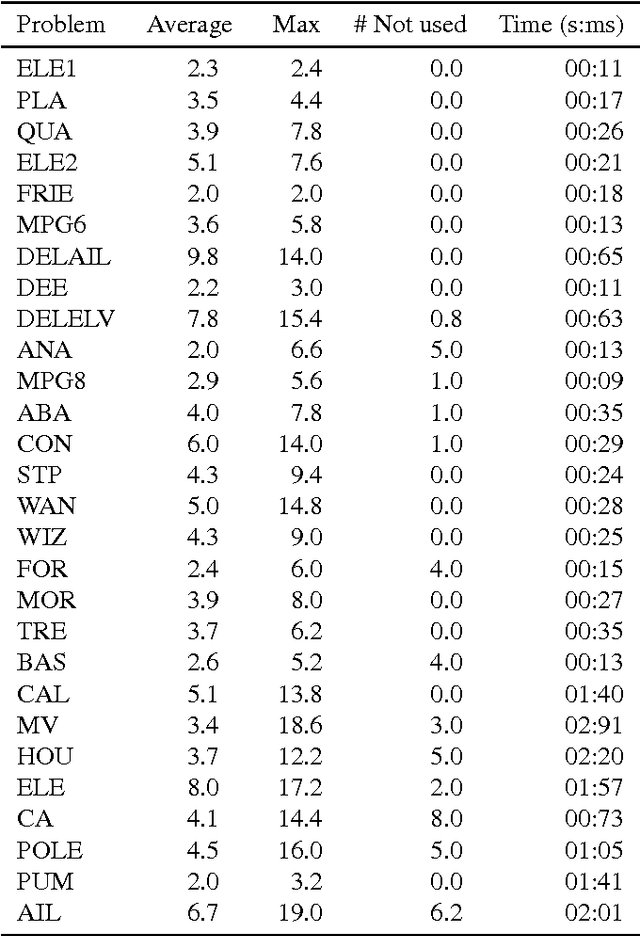
In regression problems, the use of TSK fuzzy systems is widely extended due to the precision of the obtained models. Moreover, the use of simple linear TSK models is a good choice in many real problems due to the easy understanding of the relationship between the output and input variables. In this paper we present FRULER, a new genetic fuzzy system for automatically learning accurate and simple linguistic TSK fuzzy rule bases for regression problems. In order to reduce the complexity of the learned models while keeping a high accuracy, the algorithm consists of three stages: instance selection, multi-granularity fuzzy discretization of the input variables, and the evolutionary learning of the rule base that uses the Elastic Net regularization to obtain the consequents of the rules. Each stage was validated using 28 real-world datasets and FRULER was compared with three state of the art enetic fuzzy systems. Experimental results show that FRULER achieves the most accurate and simple models compared even with approximative approaches.
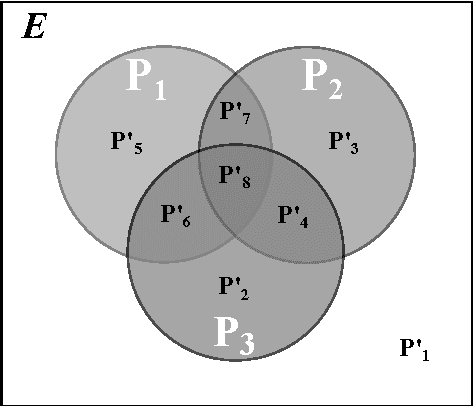
On the analysis of set-based fuzzy quantified reasoning using classical syllogistics
Nov 27, 2014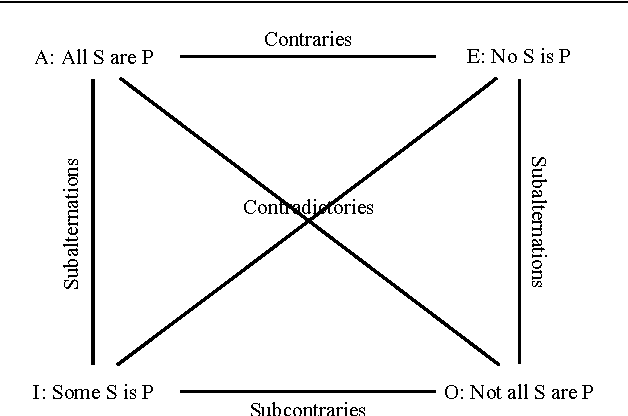
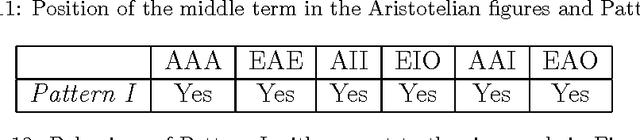

Syllogism is a type of deductive reasoning involving quantified statements. The syllogistic reasoning scheme in the classical Aristotelian framework involves three crisp term sets and four linguistic quantifiers, for which the main support is the linguistic properties of the quantifiers. A number of fuzzy approaches for defining an approximate syllogism have been proposed for which the main support is cardinality calculus. In this paper we analyze fuzzy syllogistic models previously described by Zadeh and Dubois et al. and compare their behavior with that of the classical Aristotelian framework to check which of the 24 classical valid syllogistic reasoning patterns or moods are particular crisp cases of these fuzzy approaches. This allows us to assess to what extent these approaches can be considered as either plausible extensions of the classical crisp syllogism or a basis for a general approach to the problem of approximate syllogism.
* 19 pages, 4 figures
A Fuzzy Syllogistic Reasoning Schema for Generalized Quantifiers
Nov 26, 2014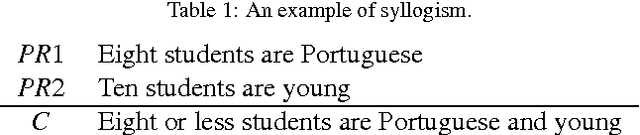
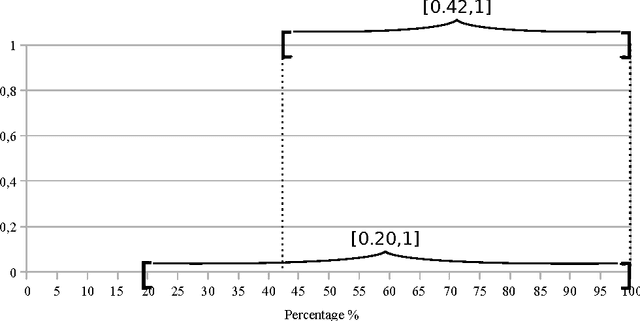
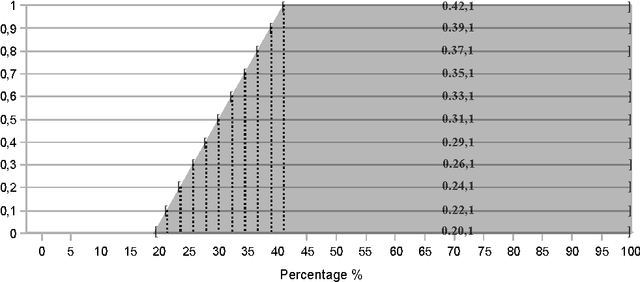
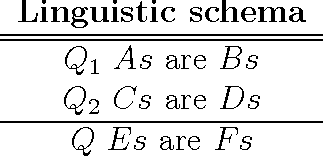
In this paper, a new approximate syllogistic reasoning schema is described that expands some of the approaches expounded in the literature into two ways: (i) a number of different types of quantifiers (logical, absolute, proportional, comparative and exception) taken from Theory of Generalized Quantifiers and similarity quantifiers, taken from statistics, are considered and (ii) any number of premises can be taken into account within the reasoning process. Furthermore, a systematic reasoning procedure to solve the syllogism is also proposed, interpreting it as an equivalent mathematical optimization problem, where the premises constitute the constraints of the searching space for the quantifier in the conclusion.
* 22 pages, 6 figures, journal paper
Linguistic Descriptions for Automatic Generation of Textual Short-Term Weather Forecasts on Real Prediction Data
Nov 18, 2014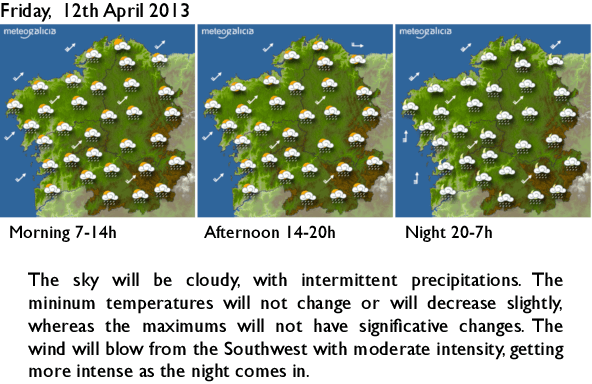
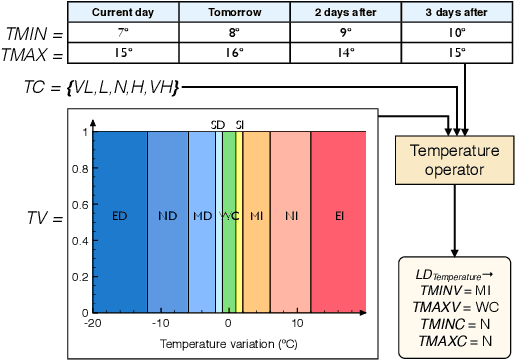
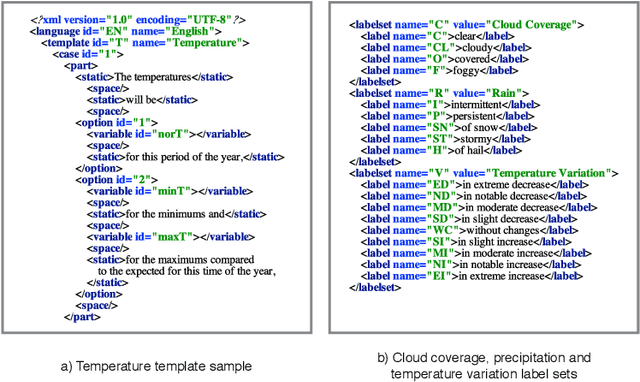
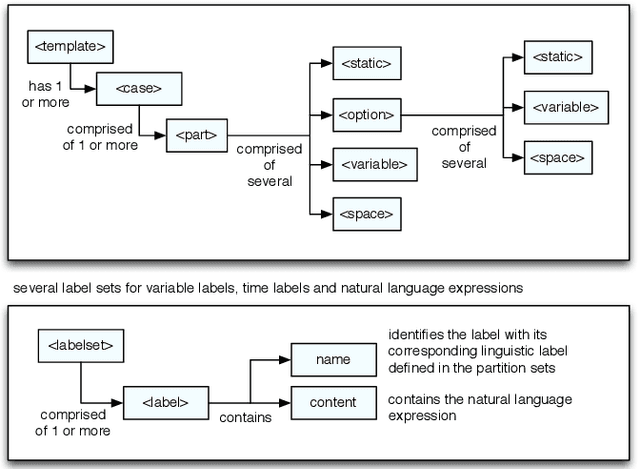
We present in this paper an application which automatically generates textual short-term weather forecasts for every municipality in Galicia (NW Spain), using the real data provided by the Galician Meteorology Agency (MeteoGalicia). This solution combines in an innovative way computing with perceptions techniques and strategies for linguistic description of data together with a natural language generation (NLG) system. The application, named GALiWeather, extracts relevant information from weather forecast input data and encodes it into intermediate descriptions using linguistic variables and temporal references. These descriptions are later translated into natural language texts by the natural language generation system. The obtained forecast results have been thoroughly validated by an expert meteorologist from MeteoGalicia using a quality assessment methodology which covers two key dimensions of a text: the accuracy of its content and the correctness of its form. Following this validation GALiWeather will be released as a real service offering custom forecasts for a wide public.
Learning Fuzzy Controllers in Mobile Robotics with Embedded Preprocessing
Nov 14, 2014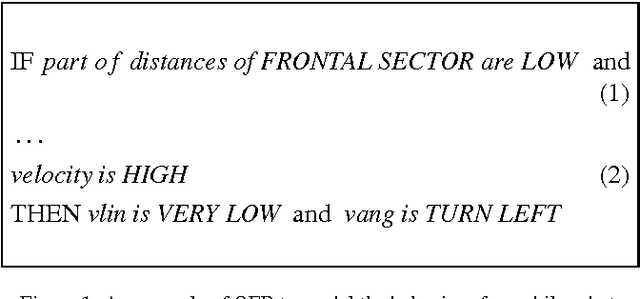
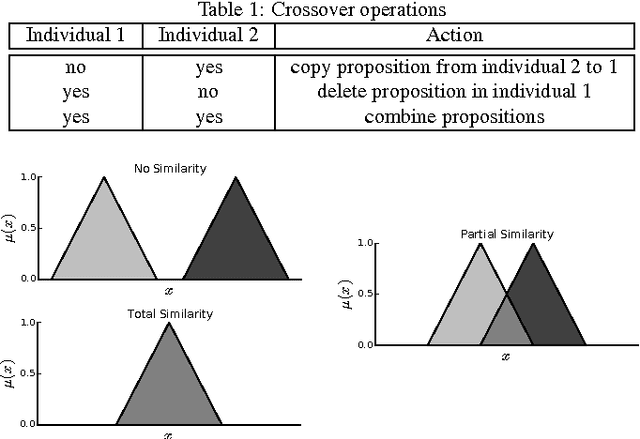
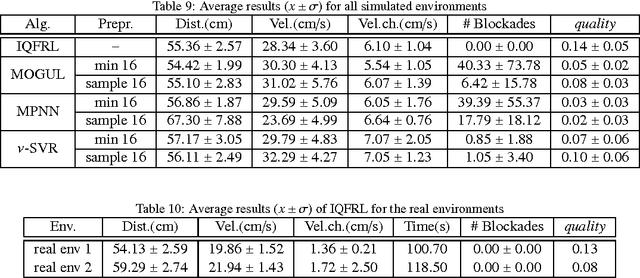
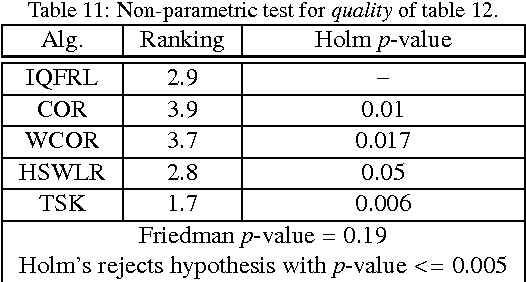
The automatic design of controllers for mobile robots usually requires two stages. In the first stage,sensorial data are preprocessed or transformed into high level and meaningful values of variables whichare usually defined from expert knowledge. In the second stage, a machine learning technique is applied toobtain a controller that maps these high level variables to the control commands that are actually sent tothe robot. This paper describes an algorithm that is able to embed the preprocessing stage into the learningstage in order to get controllers directly starting from sensorial raw data with no expert knowledgeinvolved. Due to the high dimensionality of the sensorial data, this approach uses Quantified Fuzzy Rules(QFRs), that are able to transform low-level input variables into high-level input variables, reducingthe dimensionality through summarization. The proposed learning algorithm, called Iterative QuantifiedFuzzy Rule Learning (IQFRL), is based on genetic programming. IQFRL is able to learn rules with differentstructures, and can manage linguistic variables with multiple granularities. The algorithm has been testedwith the implementation of the wall-following behavior both in several realistic simulated environmentswith different complexity and on a Pioneer 3-AT robot in two real environments. Results have beencompared with several well-known learning algorithms combined with different data preprocessingtechniques, showing that IQFRL exhibits a better and statistically significant performance. Moreover,three real world applications for which IQFRL plays a central role are also presented: path and objecttracking with static and moving obstacles avoidance.