 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMaRCSim: Maritime Robotics Simulation Modules
Jun 09, 2025Developing new functionality for underwater robots and testing them in the real world is time-consuming and resource-intensive. Simulation environments allow for rapid testing before field deployment. However, existing tools lack certain functionality for use cases in our project: i) developing learning-based methods for underwater vehicles; ii) creating teams of autonomous underwater, surface, and aerial vehicles; iii) integrating the simulation with mission planning for field experiments. A holistic solution to these problems presents great potential for bringing novel functionality into the underwater domain. In this paper we present SMaRCSim, a set of simulation packages that we have developed to help us address these issues.
Model Compression for Resource-Constrained Mobile Robots
Jul 20, 2022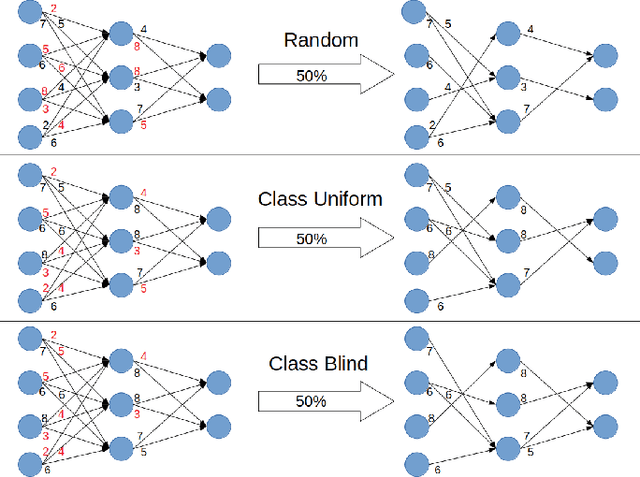



The number of mobile robots with constrained computing resources that need to execute complex machine learning models has been increasing during the past decade. Commonly, these robots rely on edge infrastructure accessible over wireless communication to execute heavy computational complex tasks. However, the edge might become unavailable and, consequently, oblige the execution of the tasks on the robot. This work focuses on making it possible to execute the tasks on the robots by reducing the complexity and the total number of parameters of pre-trained computer vision models. This is achieved by using model compression techniques such as Pruning and Knowledge Distillation. These compression techniques have strong theoretical and practical foundations, but their combined usage has not been widely explored in the literature. Therefore, this work especially focuses on investigating the effects of combining these two compression techniques. The results of this work reveal that up to 90% of the total number of parameters of a computer vision model can be removed without any considerable reduction in the model's accuracy.
* In Proceedings AREA 2022, arXiv:2207.09058
Combining Control Barrier Functions and Behavior Trees for Multi-Agent Underwater Coverage Missions
Aug 21, 2020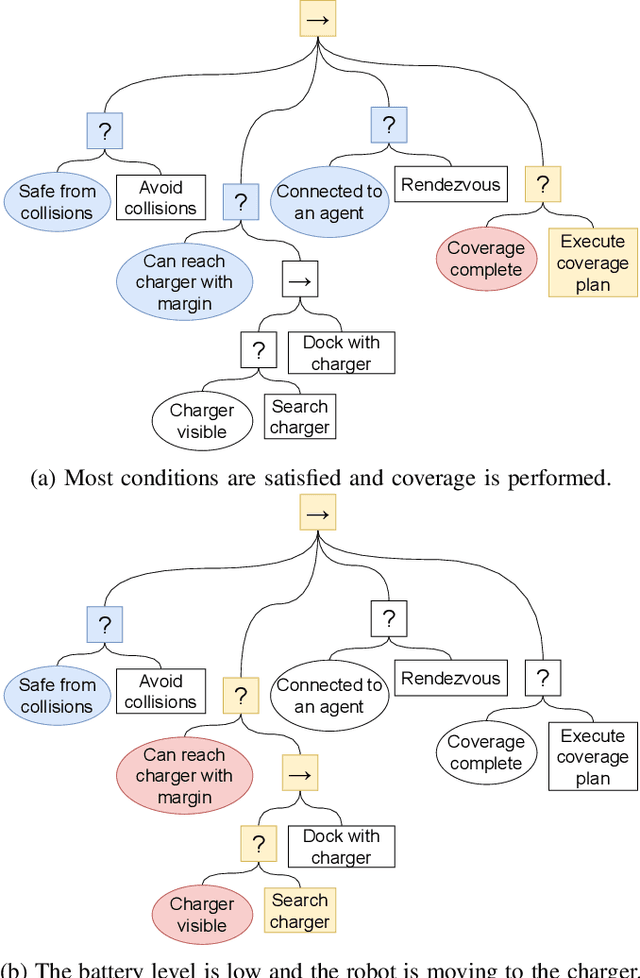
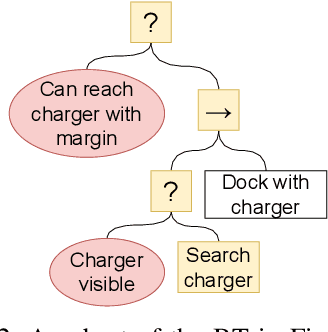
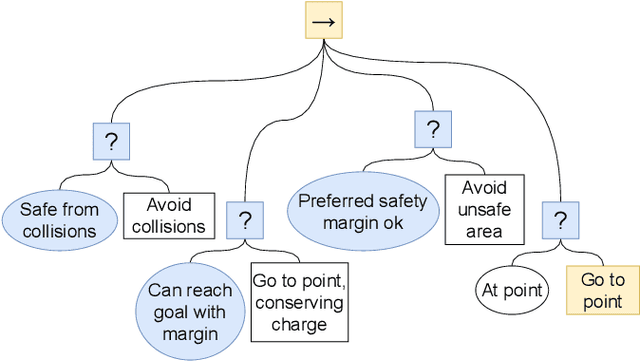
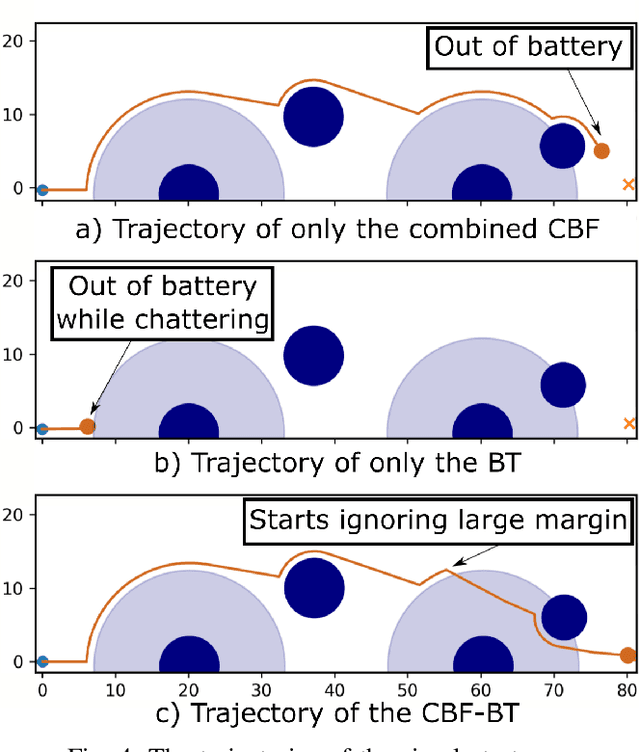
Robot missions typically involve a number of desired objectives, such as avoiding collisions, staying connected to other robots, gathering information using sensors and returning to the charging station before the battery runs out. Some of these objectives need to be taken into account at the same time, such as avoiding collisions and staying connected, while others are focused upon during different parts of the executions, such as returning to the charging station and connectivity maintenance. In this paper, we show how Control Barrier Functions(CBFs) and Behavior Trees(BTs) can be combined in a principled manner to achieve both types of task compositions, with performance guarantees in terms of mission completion. We illustrate our method with a simulated underwater coverage mission.
A Two-Step Pursuit-Evasion Algorithm for Autonomous Underwater Vehicles
Feb 22, 2019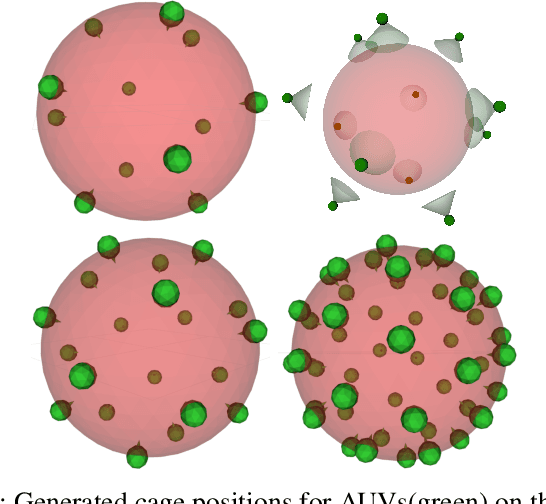
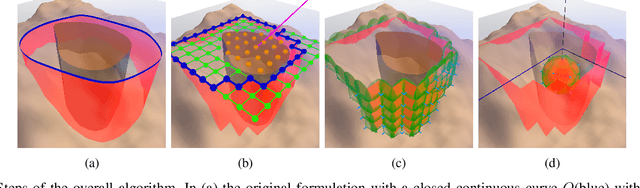
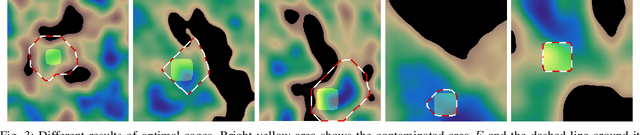
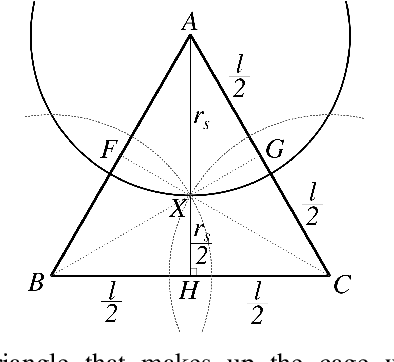
In this paper, we consider the problem of pursuit-evasion using multiple Autonomous Underwater Vehicles (AUVs) in a 3D water volume, with and without obstacles in terms of islands and the seabed topography. Pursuit-evasion is a well studied topic in robotics, but the results are mostly set in 2D environments, using unlimited line-of-sight sensing. We propose an algorithm for range-limited sensing in 3D environments that captures a finite-speed evader based on a single previous observation of its location. The pursuers are first moved to form a cage formation that contains the evader while minimizing the number of pursuers required. Upon completion of the initial cage, the cage is then changed to a smaller spherical cage that is shrunk until every part of the volume containing the evader is sensed, capturing the evader. The pursuers only need minimal communication and computation while the mission is carried out and most of the computation is done beforehand, allowing for easy implementation.
Improving the Modularity of AUV Control Systems using Behaviour Trees
Nov 01, 2018
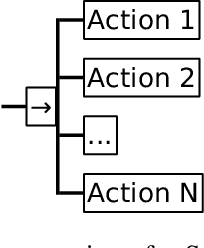

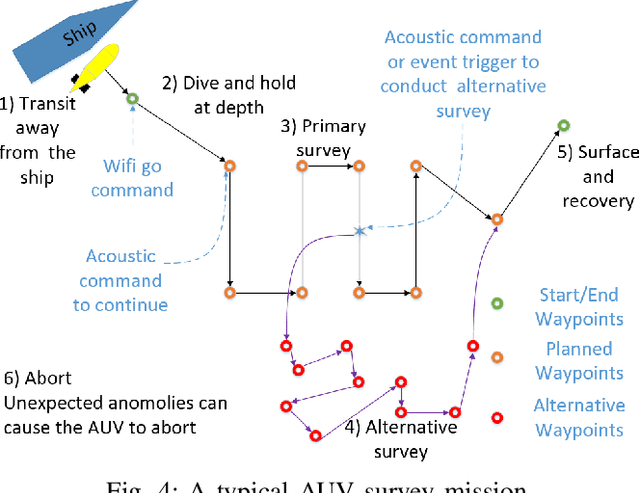
In this paper, we show how behaviour trees (BTs) can be used to design modular, versatile, and robust control architectures for mission-critical systems. In particular, we show this in the context of autonomous underwater vehicles (AUVs). Robustness, in terms of system safety, is important since manual recovery of AUVs is often extremely difficult. Further more, versatility is important to be able to execute many different kinds of missions. Finally, modularity is needed to achieve a combination of robustness and versatility, as the complexity of a versatile systems needs to be encapsulated in modules, in order to create a simple overall structure enabling robustness analysis. The proposed design is illustrated using a typical AUV mission.