Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving the Modularity of AUV Control Systems using Behaviour Trees
Paper and Code
Nov 01, 2018

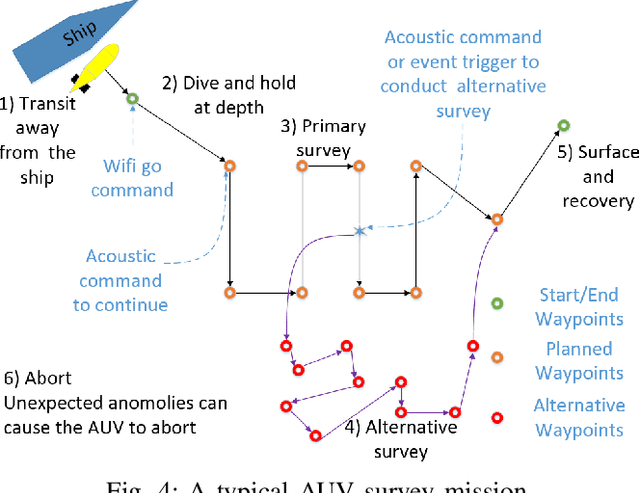
In this paper, we show how behaviour trees (BTs) can be used to design modular, versatile, and robust control architectures for mission-critical systems. In particular, we show this in the context of autonomous underwater vehicles (AUVs). Robustness, in terms of system safety, is important since manual recovery of AUVs is often extremely difficult. Further more, versatility is important to be able to execute many different kinds of missions. Finally, modularity is needed to achieve a combination of robustness and versatility, as the complexity of a versatile systems needs to be encapsulated in modules, in order to create a simple overall structure enabling robustness analysis. The proposed design is illustrated using a typical AUV mission.
* Submitted to 2018 IEEE OES Autonomous Underwater Vehicle Symposium
View paper on