 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Two-Step Pursuit-Evasion Algorithm for Autonomous Underwater Vehicles
Paper and Code
Feb 22, 2019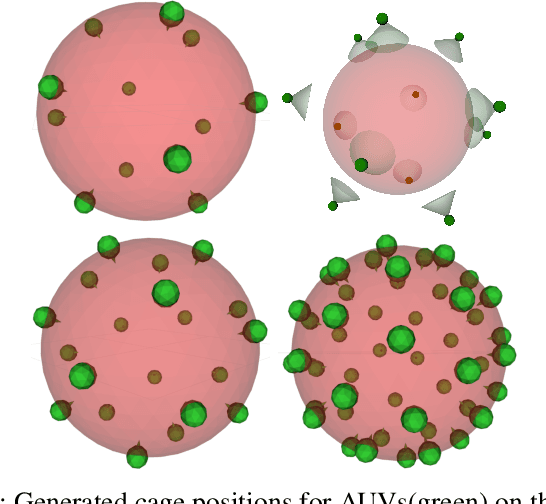
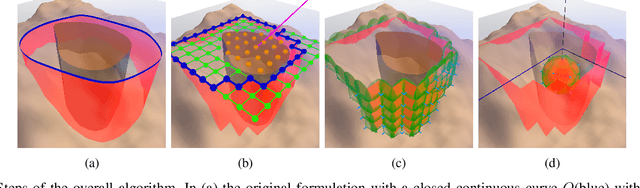
In this paper, we consider the problem of pursuit-evasion using multiple Autonomous Underwater Vehicles (AUVs) in a 3D water volume, with and without obstacles in terms of islands and the seabed topography. Pursuit-evasion is a well studied topic in robotics, but the results are mostly set in 2D environments, using unlimited line-of-sight sensing. We propose an algorithm for range-limited sensing in 3D environments that captures a finite-speed evader based on a single previous observation of its location. The pursuers are first moved to form a cage formation that contains the evader while minimizing the number of pursuers required. Upon completion of the initial cage, the cage is then changed to a smaller spherical cage that is shrunk until every part of the volume containing the evader is sensed, capturing the evader. The pursuers only need minimal communication and computation while the mission is carried out and most of the computation is done beforehand, allowing for easy implementation.