 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Coordinate Reconstruction: Posing of Image Collections via Incremental Learning of a Relocalizer
Apr 22, 2024We address the task of estimating camera parameters from a set of images depicting a scene. Popular feature-based structure-from-motion (SfM) tools solve this task by incremental reconstruction: they repeat triangulation of sparse 3D points and registration of more camera views to the sparse point cloud. We re-interpret incremental structure-from-motion as an iterated application and refinement of a visual relocalizer, that is, of a method that registers new views to the current state of the reconstruction. This perspective allows us to investigate alternative visual relocalizers that are not rooted in local feature matching. We show that scene coordinate regression, a learning-based relocalization approach, allows us to build implicit, neural scene representations from unposed images. Different from other learning-based reconstruction methods, we do not require pose priors nor sequential inputs, and we optimize efficiently over thousands of images. Our method, ACE0 (ACE Zero), estimates camera poses to an accuracy comparable to feature-based SfM, as demonstrated by novel view synthesis. Project page: https://nianticlabs.github.io/acezero/
Map-free Visual Relocalization: Metric Pose Relative to a Single Image
Oct 11, 2022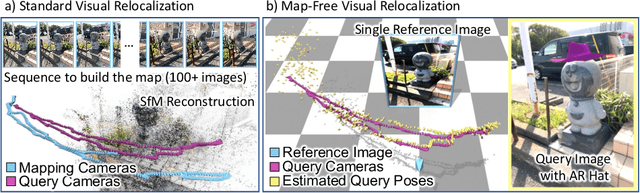
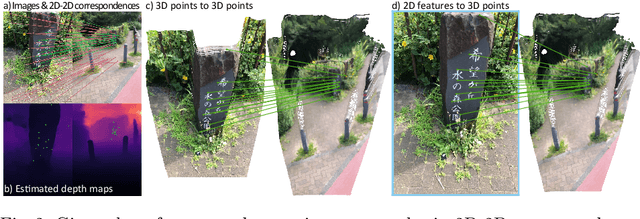
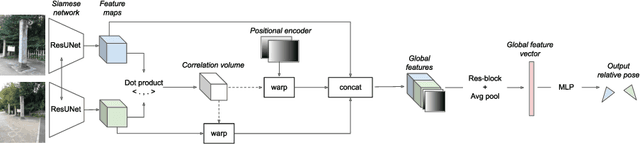
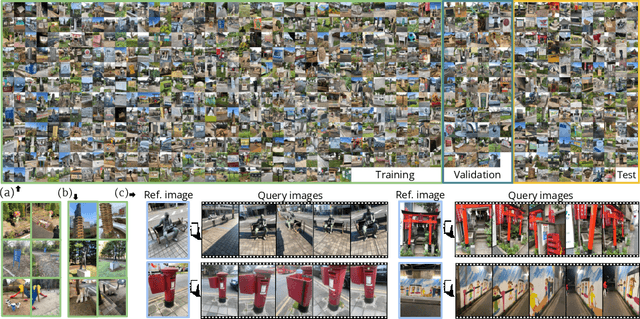
Can we relocalize in a scene represented by a single reference image? Standard visual relocalization requires hundreds of images and scale calibration to build a scene-specific 3D map. In contrast, we propose Map-free Relocalization, i.e., using only one photo of a scene to enable instant, metric scaled relocalization. Existing datasets are not suitable to benchmark map-free relocalization, due to their focus on large scenes or their limited variability. Thus, we have constructed a new dataset of 655 small places of interest, such as sculptures, murals and fountains, collected worldwide. Each place comes with a reference image to serve as a relocalization anchor, and dozens of query images with known, metric camera poses. The dataset features changing conditions, stark viewpoint changes, high variability across places, and queries with low to no visual overlap with the reference image. We identify two viable families of existing methods to provide baseline results: relative pose regression, and feature matching combined with single-image depth prediction. While these methods show reasonable performance on some favorable scenes in our dataset, map-free relocalization proves to be a challenge that requires new, innovative solutions.