 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Matters In On-Policy Reinforcement Learning? A Large-Scale Empirical Study
Paper and Code
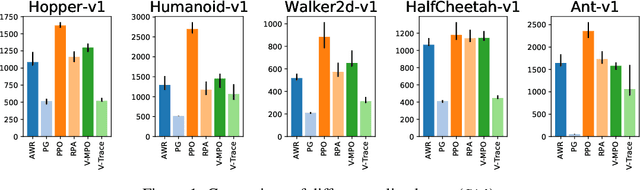
In recent years, on-policy reinforcement learning (RL) has been successfully applied to many different continuous control tasks. While RL algorithms are often conceptually simple, their state-of-the-art implementations take numerous low- and high-level design decisions that strongly affect the performance of the resulting agents. Those choices are usually not extensively discussed in the literature, leading to discrepancy between published descriptions of algorithms and their implementations. This makes it hard to attribute progress in RL and slows down overall progress [Engstrom'20]. As a step towards filling that gap, we implement >50 such ``choices'' in a unified on-policy RL framework, allowing us to investigate their impact in a large-scale empirical study. We train over 250'000 agents in five continuous control environments of different complexity and provide insights and practical recommendations for on-policy training of RL agents.