 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakM3D: Towards Weakly Supervised Monocular 3D Object Detection
Paper and Code
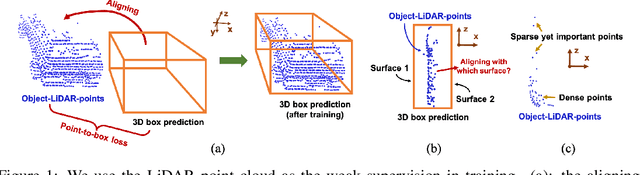
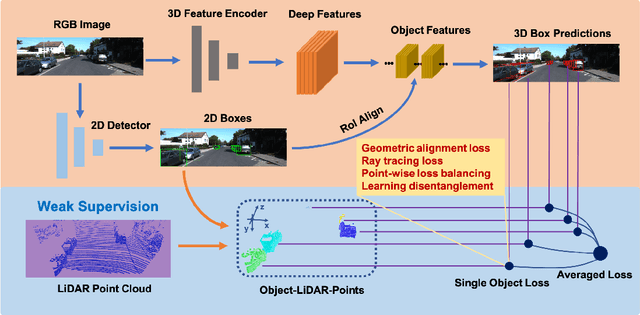

Monocular 3D object detection is one of the most challenging tasks in 3D scene understanding. Due to the ill-posed nature of monocular imagery, existing monocular 3D detection methods highly rely on training with the manually annotated 3D box labels on the LiDAR point clouds. This annotation process is very laborious and expensive. To dispense with the reliance on 3D box labels, in this paper we explore the weakly supervised monocular 3D detection. Specifically, we first detect 2D boxes on the image. Then, we adopt the generated 2D boxes to select corresponding RoI LiDAR points as the weak supervision. Eventually, we adopt a network to predict 3D boxes which can tightly align with associated RoI LiDAR points. This network is learned by minimizing our newly-proposed 3D alignment loss between the 3D box estimates and the corresponding RoI LiDAR points. We will illustrate the potential challenges of the above learning problem and resolve these challenges by introducing several effective designs into our method. Codes will be available at https://github.com/SPengLiang/WeakM3D.