 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-inertial self-calibration on informative motion segments
Paper and Code
Aug 08, 2017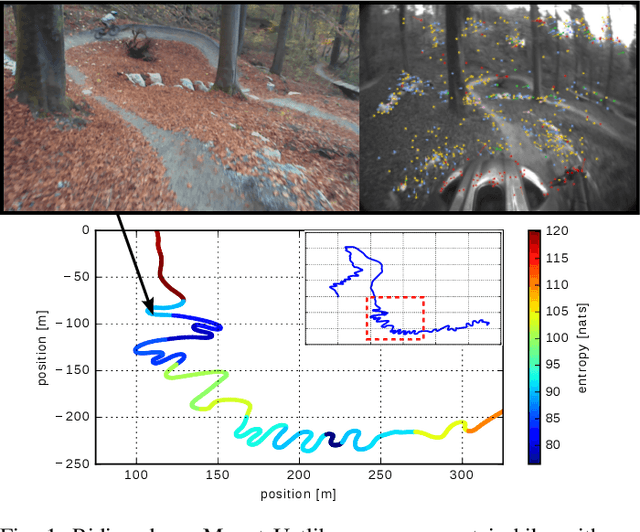

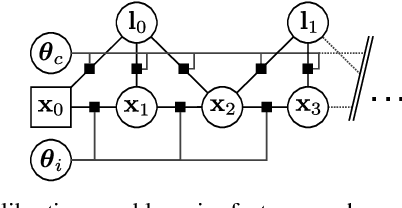
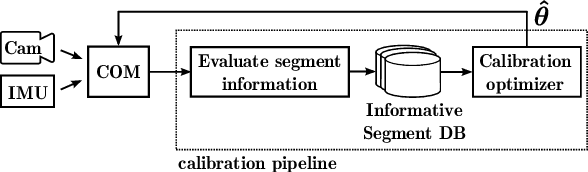
Environmental conditions and external effects, such as shocks, have a significant impact on the calibration parameters of visual-inertial sensor systems. Thus long-term operation of these systems cannot fully rely on factory calibration. Since the observability of certain parameters is highly dependent on the motion of the device, using short data segments at device initialization may yield poor results. When such systems are additionally subject to energy constraints, it is also infeasible to use full-batch approaches on a big dataset and careful selection of the data is of high importance. In this paper, we present a novel approach for resource efficient self-calibration of visual-inertial sensor systems. This is achieved by casting the calibration as a segment-based optimization problem that can be run on a small subset of informative segments. Consequently, the computational burden is limited as only a predefined number of segments is used. We also propose an efficient information-theoretic selection to identify such informative motion segments. In evaluations on a challenging dataset, we show our approach to significantly outperform state-of-the-art in terms of computational burden while maintaining a comparable accuracy.