 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVeniBot: Towards Autonomous Venipuncture with Automatic Puncture Area and Angle Regression from NIR Images
Paper and Code
May 27, 2021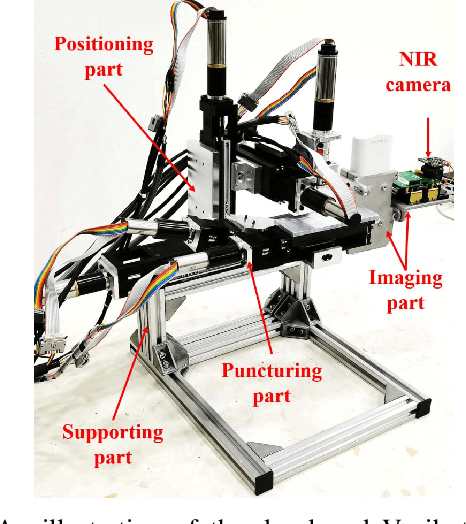
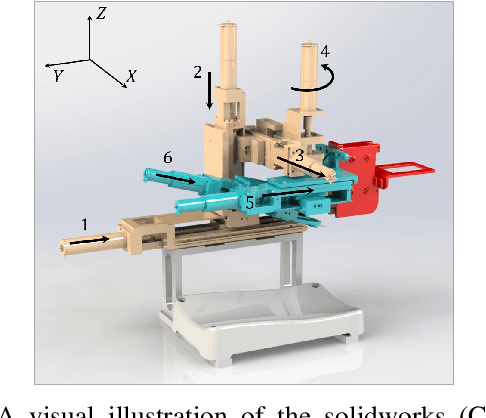
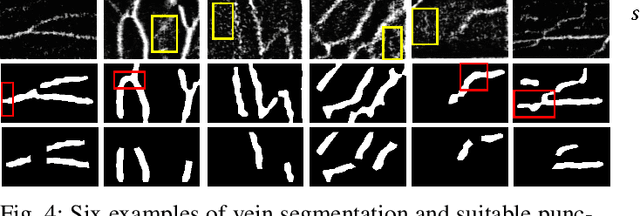
Venipucture is a common step in clinical scenarios, and is with highly practical value to be automated with robotics. Nowadays, only a few on-shelf robotic systems are developed, however, they can not fulfill practical usage due to varied reasons. In this paper, we develop a compact venipucture robot -- VeniBot, with four parts, six motors and two imaging devices. For the automation, we focus on the positioning part and propose a Dual-In-Dual-Out network based on two-step learning and two-task learning, which can achieve fully automatic regression of the suitable puncture area and angle from near-infrared(NIR) images. The regressed suitable puncture area and angle can further navigate the positioning part of VeniBot, which is an important step towards a fully autonomous venipucture robot. Validation on 30 VeniBot-collected volunteers shows a high mean dice coefficient(DSC) of 0.7634 and a low angle error of 15.58{\deg} on suitable puncture area and angle regression respectively, indicating its potentially wide and practical application in the future.