 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValue Propagation Networks
Paper and Code
May 28, 2018


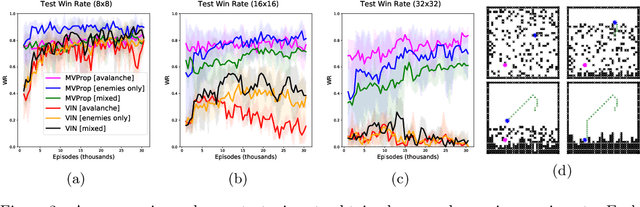
We present Value Propagation (VProp), a parameter-efficient differentiable planning module built on Value Iteration which can successfully be trained using reinforcement learning to solve unseen tasks, has the capability to generalize to larger map sizes, and can learn to navigate in dynamic environments. Furthermore, we show that the module enables learning to plan when the environment also includes stochastic elements, providing a cost-efficient learning system to build low-level size-invariant planners for a variety of interactive navigation problems. We evaluate on static and dynamic configurations of MazeBase grid-worlds, with randomly generated environments of several different sizes, and on a StarCraft navigation scenario, with more complex dynamics, and pixels as input.