 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUni6Dv2: Noise Elimination for 6D Pose Estimation
Paper and Code
Aug 15, 2022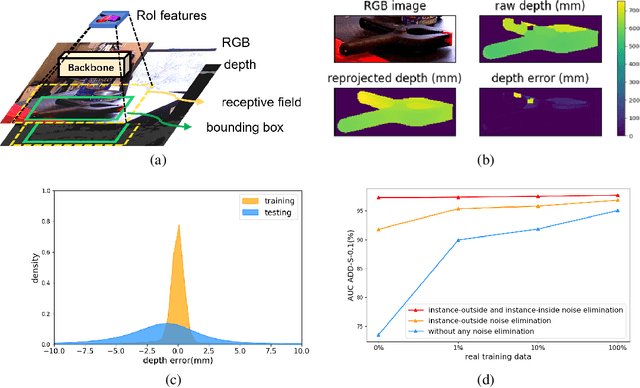
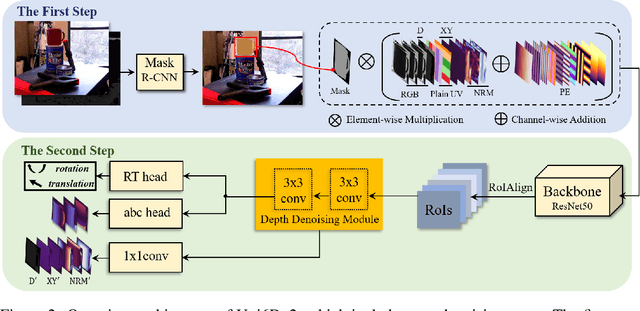
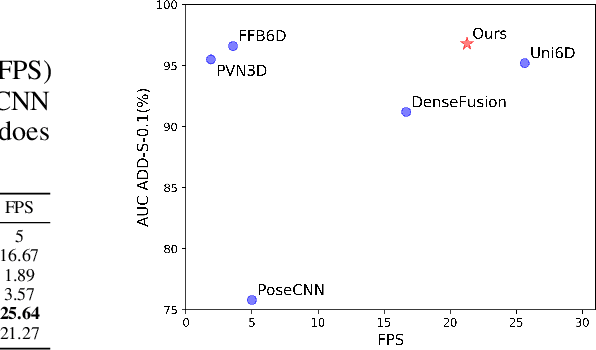
Few prior 6D pose estimation methods use a backbone network to extract features from RGB and depth images, and Uni6D is the pioneer to do so. We find that primary causes of the performance limitation in Uni6D are Instance-Outside and Instance-Inside noise. Uni6D inevitably introduces Instance-Outside noise from background pixels in the receptive field due to its inherently straightforward pipeline design and ignores the Instance-Inside noise in the input depth data. In this work, we propose a two-step denoising method to handle aforementioned noise in Uni6D. In the first step, an instance segmentation network is used to crop and mask the instance to remove noise from non-instance regions. In the second step, a lightweight depth denoising module is proposed to calibrate the depth feature before feeding it into the pose regression network. Extensive experiments show that our method called Uni6Dv2 is able to eliminate the noise effectively and robustly, outperforming Uni6D without sacrificing too much inference efficiency. It also reduces the need for annotated real data that requires costly labeling.