 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Uniform Point Distribution in Feature-preserving Point Cloud Filtering
Paper and Code
Jan 17, 2022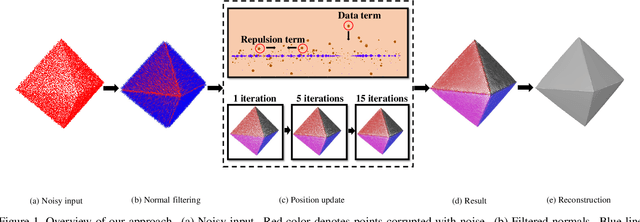
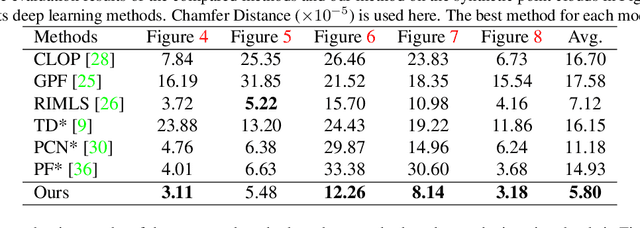
As a popular representation of 3D data, point cloud may contain noise and need to be filtered before use. Existing point cloud filtering methods either cannot preserve sharp features or result in uneven point distribution in the filtered output. To address this problem, this paper introduces a point cloud filtering method that considers both point distribution and feature preservation during filtering. The key idea is to incorporate a repulsion term with a data term in energy minimization. The repulsion term is responsible for the point distribution, while the data term is to approximate the noisy surfaces while preserving the geometric features. This method is capable of handling models with fine-scale features and sharp features. Extensive experiments show that our method yields better results with a more uniform point distribution ($5.8\times10^{-5}$ Chamfer Distance on average) in seconds.