 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Teachable Autonomous Agents
Paper and Code
May 25, 2021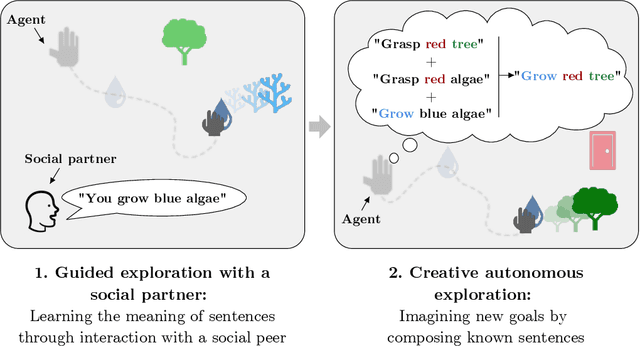
Autonomous discovery and direct instruction are two extreme sources of learning in children, but educational sciences have shown that intermediate approaches such as assisted discovery or guided play resulted in better acquisition of skills. When turning to Artificial Intelligence, the above dichotomy is translated into the distinction between autonomous agents which learn in isolation and interactive learning agents which can be taught by social partners but generally lack autonomy. In between should stand teachable autonomous agents: agents learning from both internal and teaching signals to benefit from the higher efficiency of assisted discovery. Such agents could learn on their own in the real world, but non-expert users could drive their learning behavior towards their expectations. More fundamentally, combining both capabilities might also be a key step towards general intelligence. In this paper we elucidate obstacles along this research line. First, we build on a seminal work of Bruner to extract relevant features of the assisted discovery processes. Second, we describe current research on autotelic agents, i.e. agents equipped with forms of intrinsic motivations that enable them to represent, self-generate and pursue their own goals. We argue that autotelic capabilities are paving the way towards teachable and autonomous agents. Finally, we adopt a social learning perspective on tutoring interactions and we highlight some components that are currently missing to autotelic agents before they can be taught by ordinary people using natural pedagogy, and we provide a list of specific research questions that emerge from this perspective.