 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStyleLoco: Generative Adversarial Distillation for Natural Humanoid Robot Locomotion
Paper and Code
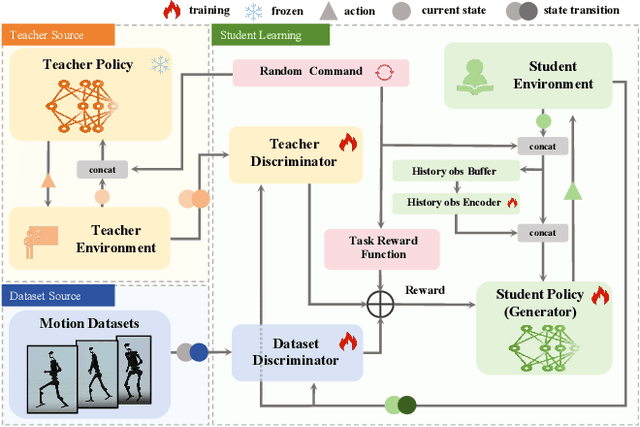
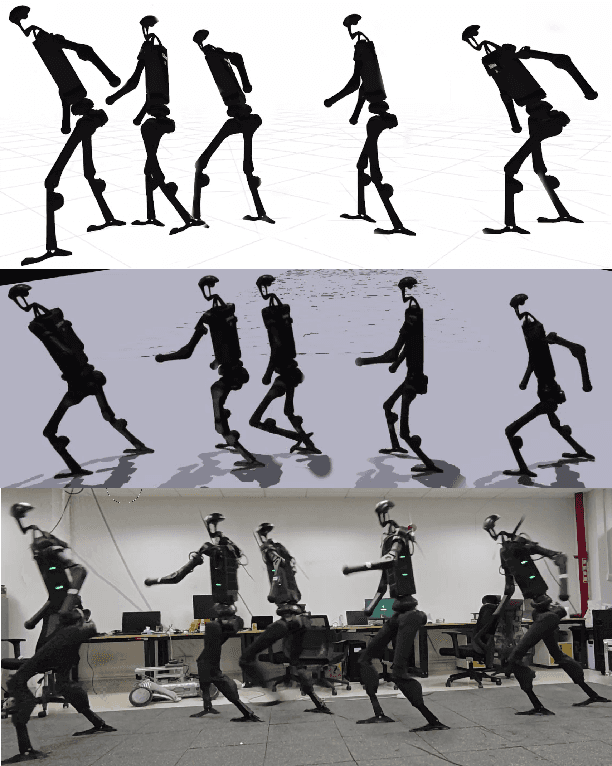
Humanoid robots are anticipated to acquire a wide range of locomotion capabilities while ensuring natural movement across varying speeds and terrains. Existing methods encounter a fundamental dilemma in learning humanoid locomotion: reinforcement learning with handcrafted rewards can achieve agile locomotion but produces unnatural gaits, while Generative Adversarial Imitation Learning (GAIL) with motion capture data yields natural movements but suffers from unstable training processes and restricted agility. Integrating these approaches proves challenging due to the inherent heterogeneity between expert policies and human motion datasets. To address this, we introduce StyleLoco, a novel two-stage framework that bridges this gap through a Generative Adversarial Distillation (GAD) process. Our framework begins by training a teacher policy using reinforcement learning to achieve agile and dynamic locomotion. It then employs a multi-discriminator architecture, where distinct discriminators concurrently extract skills from both the teacher policy and motion capture data. This approach effectively combines the agility of reinforcement learning with the natural fluidity of human-like movements while mitigating the instability issues commonly associated with adversarial training. Through extensive simulation and real-world experiments, we demonstrate that StyleLoco enables humanoid robots to perform diverse locomotion tasks with the precision of expertly trained policies and the natural aesthetics of human motion, successfully transferring styles across different movement types while maintaining stable locomotion across a broad spectrum of command inputs.