 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Trajectory Prediction via Motion Indeterminacy Diffusion
Paper and Code
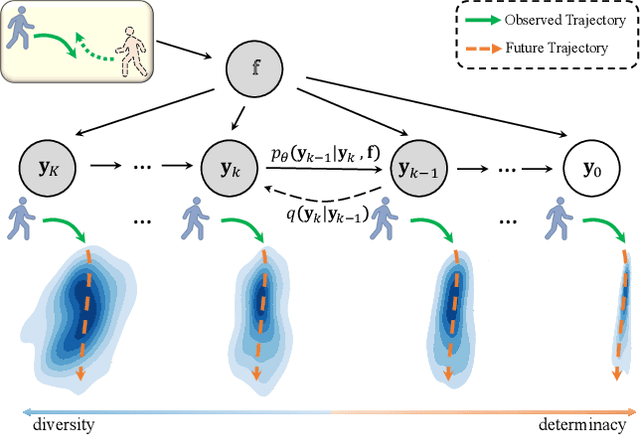
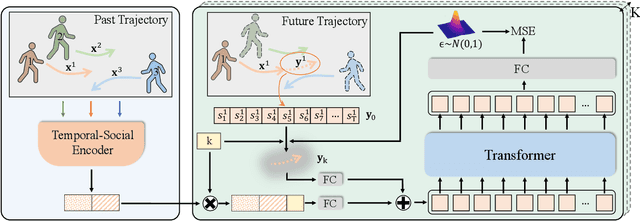
Human behavior has the nature of indeterminacy, which requires the pedestrian trajectory prediction system to model the multi-modality of future motion states. Unlike existing stochastic trajectory prediction methods which usually use a latent variable to represent multi-modality, we explicitly simulate the process of human motion variation from indeterminate to determinate. In this paper, we present a new framework to formulate the trajectory prediction task as a reverse process of motion indeterminacy diffusion (MID), in which we progressively discard indeterminacy from all the walkable areas until reaching the desired trajectory. This process is learned with a parameterized Markov chain conditioned by the observed trajectories. We can adjust the length of the chain to control the degree of indeterminacy and balance the diversity and determinacy of the predictions. Specifically, we encode the history behavior information and the social interactions as a state embedding and devise a Transformer-based diffusion model to capture the temporal dependencies of trajectories. Extensive experiments on the human trajectory prediction benchmarks including the Stanford Drone and ETH/UCY datasets demonstrate the superiority of our method. Code is available at https://github.com/gutianpei/MID.