 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOE-Net: A Self-Attention and Orientation Encoding Network for Point Cloud based Place Recognition
Paper and Code
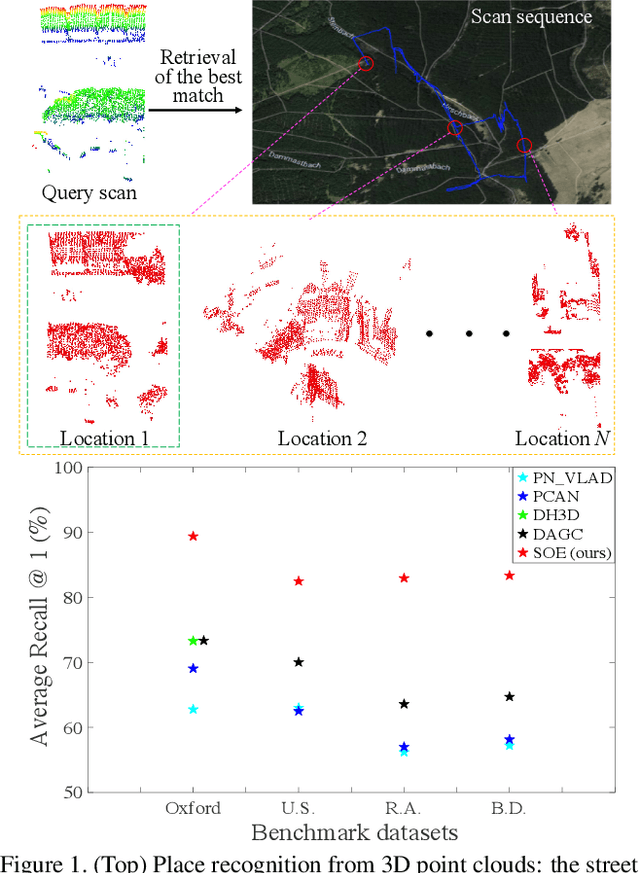
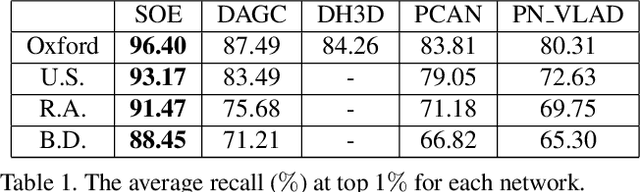

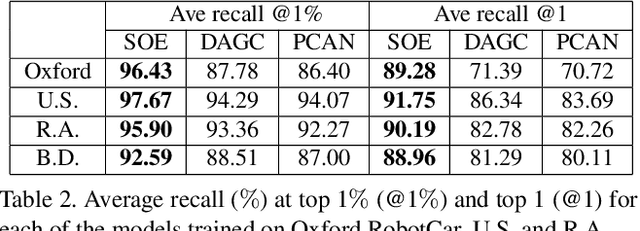
We tackle the problem of place recognition from point cloud data and introduce a self-attention and orientation encoding network (SOE-Net) that fully explores the relationship between points and incorporates long-range context into point-wise local descriptors. Local information of each point from eight orientations is captured in a PointOE module, whereas long-range feature dependencies among local descriptors are captured with a self-attention unit. Moreover, we propose a novel loss function called Hard Positive Hard Negative quadruplet loss (HPHN quadruplet), that achieves better performance than the commonly used metric learning loss. Experiments on various benchmark datasets demonstrate promising performance of the proposed network. It significantly outperforms the current state-of-the-art approaches - the average recall at top 1 retrieval on the Oxford RobotCar dataset is improved by over 16%. Codes and the trained model will be made publicly available.