 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSignage-Aware Exploration in Open World using Venue Maps
Paper and Code
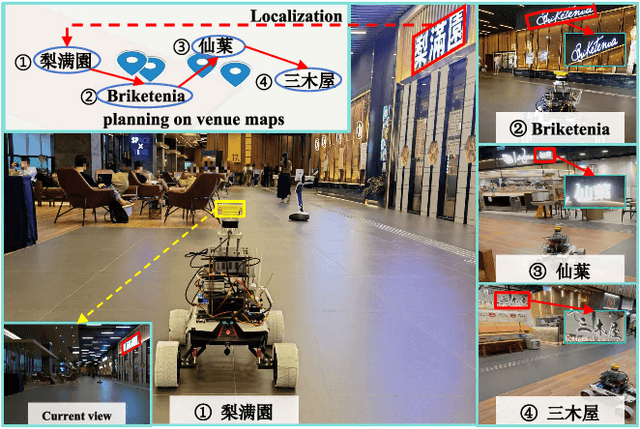
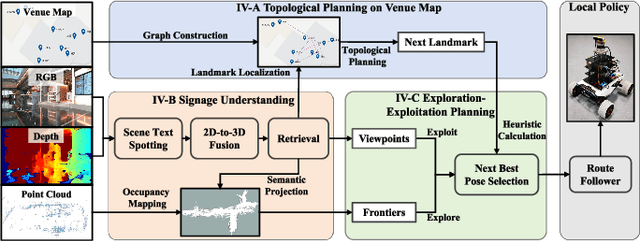
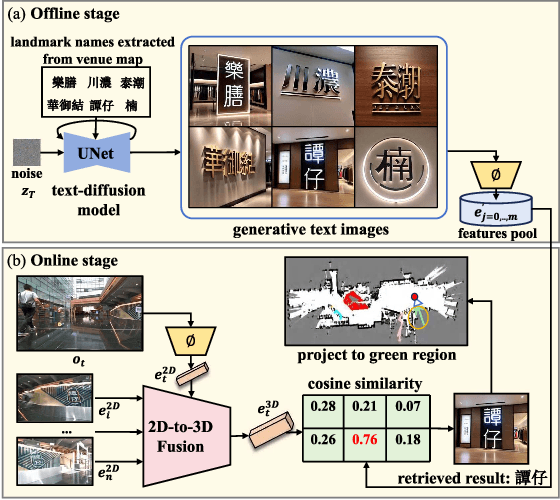
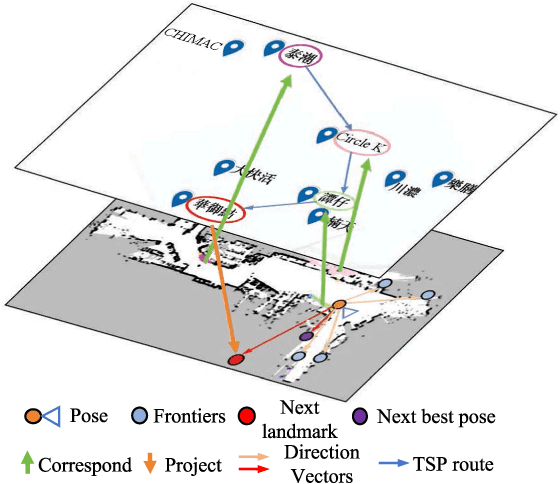
Current exploration methods struggle to search for shops in unknown open-world environments due to a lack of prior knowledge and text recognition capabilities. Venue maps offer valuable information that can aid exploration planning by correlating scene signage with map data. However, the arbitrary shapes and styles of the text on signage, along with multi-view inconsistencies, pose significant challenges for accurate recognition by robots. Additionally, the discrepancies between real-world environments and venue maps hinder the incorporation of text information into planners. This paper introduces a novel signage-aware exploration system to address these challenges, enabling the robot to utilize venue maps effectively. We propose a signage understanding method that accurately detects and recognizes the text on signage using a diffusion-based text instance retrieval method combined with a 2D-to-3D semantic fusion strategy. Furthermore, we design a venue map-guided exploration-exploitation planner that balances exploration in unknown regions using a directional heuristic derived from venue maps with exploitation to get close and adjust orientation for better recognition. Experiments in large-scale shopping malls demonstrate our method's superior signage recognition accuracy and coverage efficiency, outperforming state-of-the-art scene text spotting methods and traditional exploration methods.