 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSGCN:Sparse Graph Convolution Network for Pedestrian Trajectory Prediction
Paper and Code

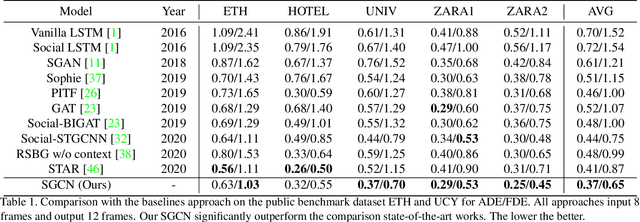
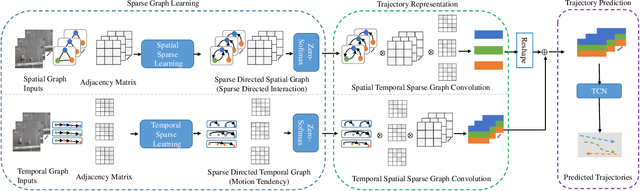
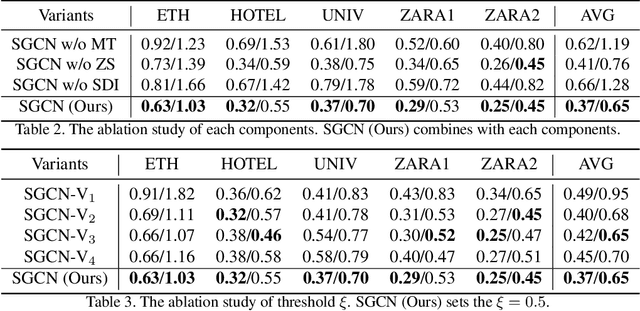
Pedestrian trajectory prediction is a key technology in autopilot, which remains to be very challenging due to complex interactions between pedestrians. However, previous works based on dense undirected interaction suffer from modeling superfluous interactions and neglect of trajectory motion tendency, and thus inevitably result in a considerable deviance from the reality. To cope with these issues, we present a Sparse Graph Convolution Network~(SGCN) for pedestrian trajectory prediction. Specifically, the SGCN explicitly models the sparse directed interaction with a sparse directed spatial graph to capture adaptive interaction pedestrians. Meanwhile, we use a sparse directed temporal graph to model the motion tendency, thus to facilitate the prediction based on the observed direction. Finally, parameters of a bi-Gaussian distribution for trajectory prediction are estimated by fusing the above two sparse graphs. We evaluate our proposed method on the ETH and UCY datasets, and the experimental results show our method outperforms comparative state-of-the-art methods by 9% in Average Displacement Error(ADE) and 13% in Final Displacement Error(FDE). Notably, visualizations indicate that our method can capture adaptive interactions between pedestrians and their effective motion tendencies.