 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmenting Unknown 3D Objects from Real Depth Images using Mask R-CNN Trained on Synthetic Data
Paper and Code
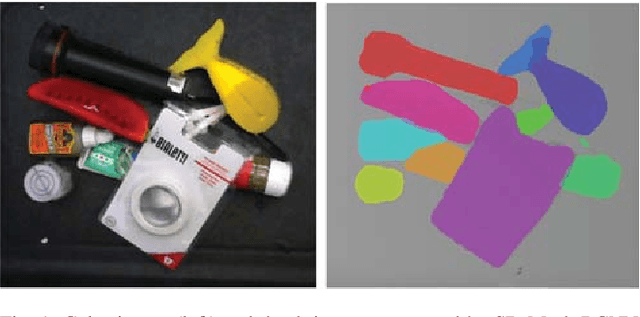



The ability to segment unknown objects in depth images has potential to enhance robot skills in grasping and object tracking. Recent computer vision research has demonstrated that Mask R-CNN can be trained to segment specific categories of objects in RGB images when massive hand-labeled datasets are available. As generating these datasets is time consuming, we instead train with synthetic depth images. Many robots now use depth sensors, and recent results suggest training on synthetic depth data can transfer successfully to the real world. We present a method for automated dataset generation and rapidly generate a synthetic training dataset of 50,000 depth images and 320,000 object masks using simulated heaps of 3D CAD models. We train a variant of Mask R-CNN with domain randomization on the generated dataset to perform category-agnostic instance segmentation without any hand-labeled data and we evaluate the trained network, which we refer to as Synthetic Depth (SD) Mask R-CNN, on a set of real, high-resolution depth images of challenging, densely-cluttered bins containing objects with highly-varied geometry. SD Mask R-CNN outperforms point cloud clustering baselines by an absolute 15% in Average Precision and 20% in Average Recall on COCO benchmarks, and achieves performance levels similar to a Mask R-CNN trained on a massive, hand-labeled RGB dataset and fine-tuned on real images from the experimental setup. We deploy the model in an instance-specific grasping pipeline to demonstrate its usefulness in a robotics application. Code, the synthetic training dataset, and supplementary material are available at https://bit.ly/2letCuE.