 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSALT: A Flexible Semi-Automatic Labeling Tool for General LiDAR Point Clouds with Cross-Scene Adaptability and 4D Consistency
Paper and Code
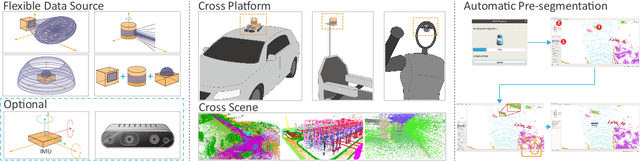
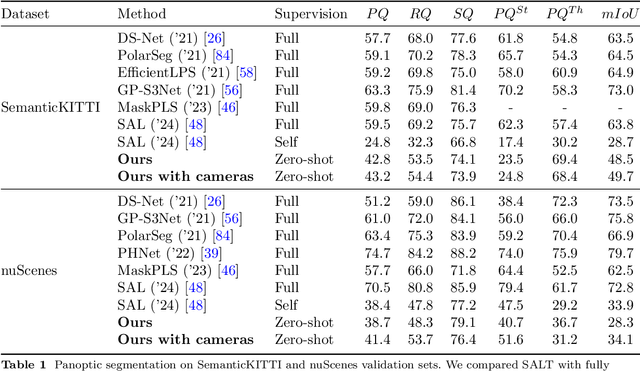
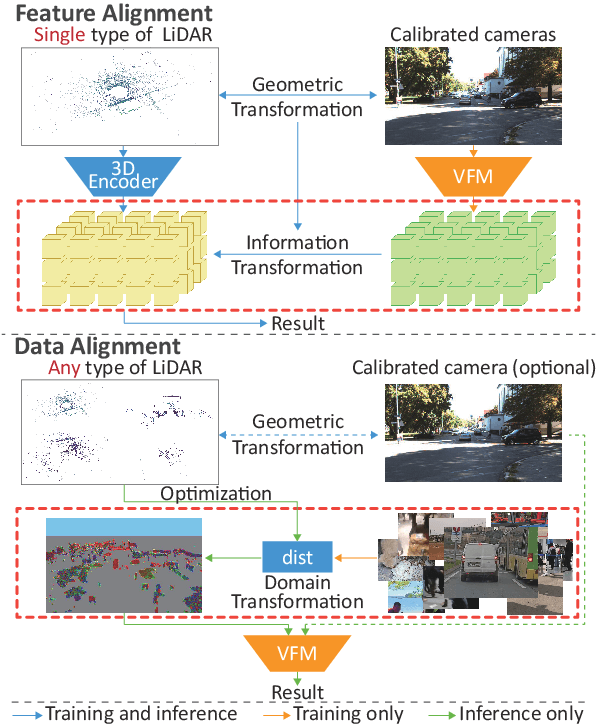
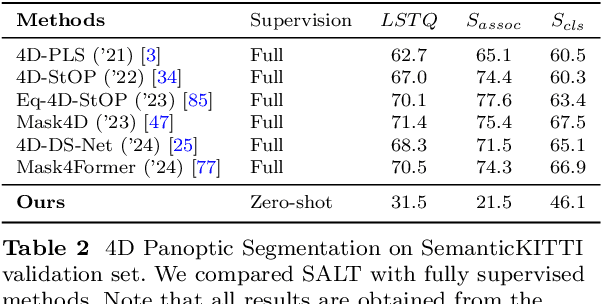
We propose a flexible Semi-Automatic Labeling Tool (SALT) for general LiDAR point clouds with cross-scene adaptability and 4D consistency. Unlike recent approaches that rely on camera distillation, SALT operates directly on raw LiDAR data, automatically generating pre-segmentation results. To achieve this, we propose a novel zero-shot learning paradigm, termed data alignment, which transforms LiDAR data into pseudo-images by aligning with the training distribution of vision foundation models. Additionally, we design a 4D-consistent prompting strategy and 4D non-maximum suppression module to enhance SAM2, ensuring high-quality, temporally consistent presegmentation. SALT surpasses the latest zero-shot methods by 18.4% PQ on SemanticKITTI and achieves nearly 40-50% of human annotator performance on our newly collected low-resolution LiDAR data and on combined data from three LiDAR types, significantly boosting annotation efficiency. We anticipate that SALT's open-sourcing will catalyze substantial expansion of current LiDAR datasets and lay the groundwork for the future development of LiDAR foundation models. Code is available at https://github.com/Cavendish518/SALT.