 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgesafe-control-gym: a Unified Benchmark Suite for Safe Learning-based Control and Reinforcement Learning
Paper and Code
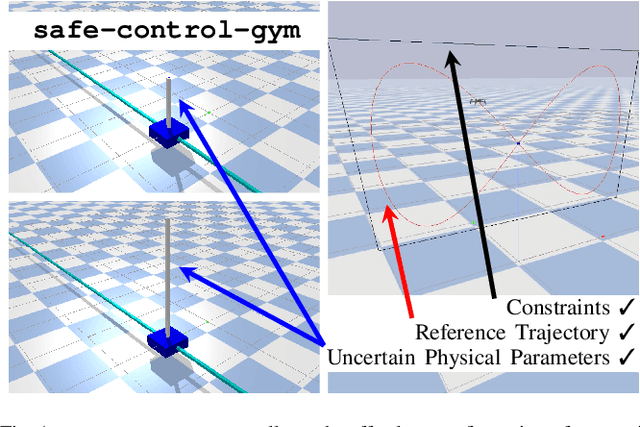
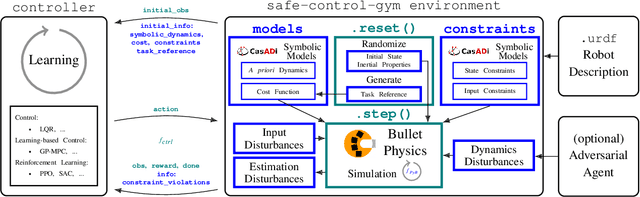
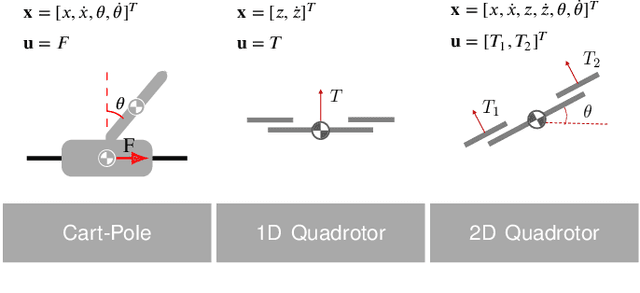
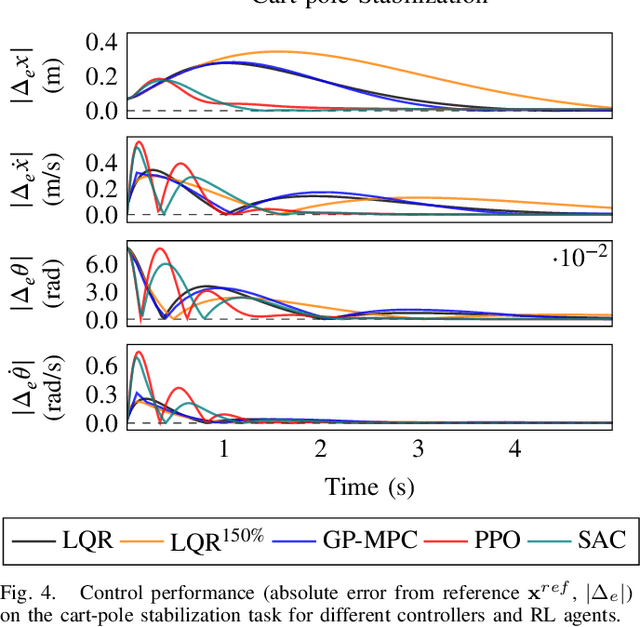
In recent years, reinforcement learning and learning-based control -- as well as the study of their safety, crucial for deployment in real-world robots -- have gained significant traction. However, to adequately gauge the progress and applicability of new results, we need the tools to equitably compare the approaches proposed by the controls and reinforcement learning communities. Here, we propose a new open-source benchmark suite, called safe-control-gym. Our starting point is OpenAI's Gym API, which is one of the de facto standard in reinforcement learning research. Yet, we highlight the reasons for its limited appeal to control theory researchers -- and safe control, in particular. E.g., the lack of analytical models and constraint specifications. Thus, we propose to extend this API with (i) the ability to specify (and query) symbolic models and constraints and (ii) introduce simulated disturbances in the control inputs, measurements, and inertial properties. We provide implementations for three dynamic systems -- the cart-pole, 1D, and 2D quadrotor -- and two control tasks -- stabilization and trajectory tracking. To demonstrate our proposal -- and in an attempt to bring research communities closer together -- we show how to use safe-control-gym to quantitatively compare the control performance, data efficiency, and safety of multiple approaches from the areas of traditional control, learning-based control, and reinforcement learning.