 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROI-based Robotic Grasp Detection for Object Overlapping Scenes
Paper and Code
Mar 14, 2019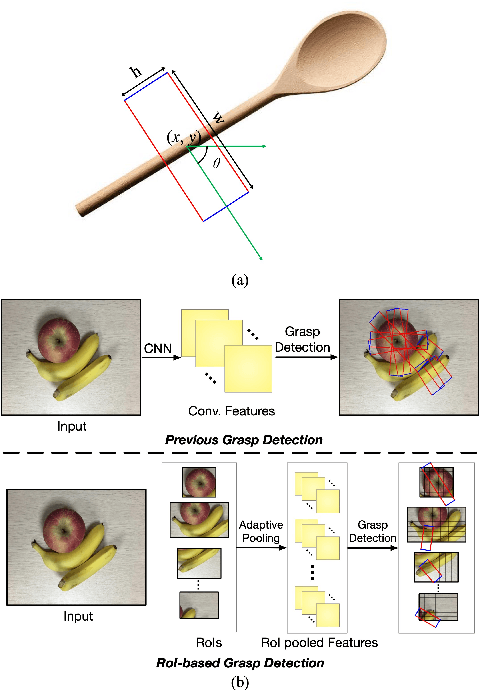
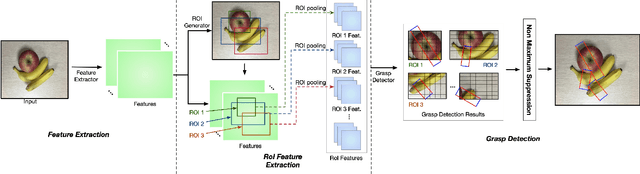
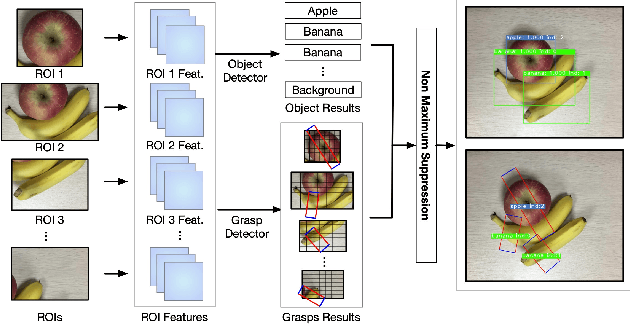
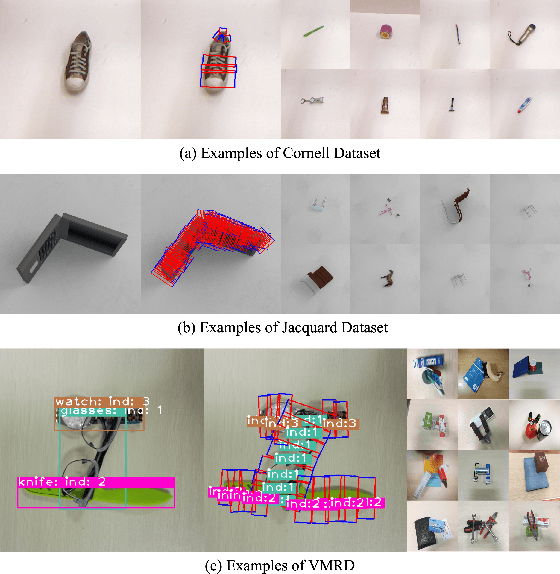
Grasp detection with consideration of the affiliations between grasps and their owner in object overlapping scenes is a necessary and challenging task for the practical use of the robotic grasping approach. In this paper, a robotic grasp detection algorithm named ROI-GD is proposed to provide a feasible solution to this problem based on Region of Interest (ROI), which is the region proposal for objects. ROI-GD uses features from ROIs to detect grasps instead of the whole scene. It has two stages: the first stage is to provide ROIs in the input image and the second-stage is the grasp detector based on ROI features. We also contribute a multi-object grasp dataset, which is much larger than Cornell Grasp Dataset, by labeling Visual Manipulation Relationship Dataset. Experimental results demonstrate that ROI-GD performs much better in object overlapping scenes and at the meantime, remains comparable with state-of-the-art grasp detection algorithms on Cornell Grasp Dataset and Jacquard Dataset. Robotic experiments demonstrate that ROI-GD can help robots grasp the target in single-object and multi-object scenes with the overall success rates of 92.5% and 83.8% respectively.