 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Monocular Flight in Cluttered Outdoor Environments
Paper and Code
Apr 16, 2016

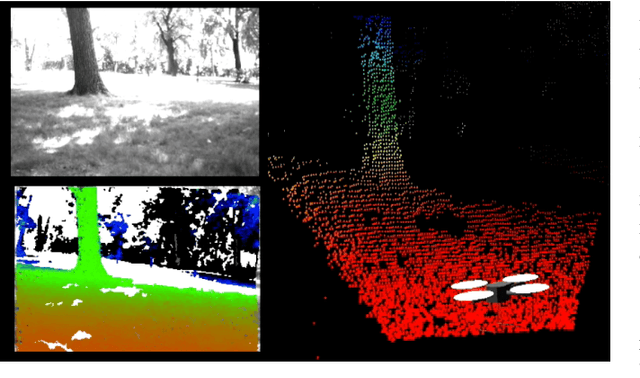

Recently, there have been numerous advances in the development of biologically inspired lightweight Micro Aerial Vehicles (MAVs). While autonomous navigation is fairly straight-forward for large UAVs as expensive sensors and monitoring devices can be employed, robust methods for obstacle avoidance remains a challenging task for MAVs which operate at low altitude in cluttered unstructured environments. Due to payload and power constraints, it is necessary for such systems to have autonomous navigation and flight capabilities using mostly passive sensors such as cameras. In this paper, we describe a robust system that enables autonomous navigation of small agile quad-rotors at low altitude through natural forest environments. We present a direct depth estimation approach that is capable of producing accurate, semi-dense depth-maps in real time. Furthermore, a novel wind-resistant control scheme is presented that enables stable way-point tracking even in the presence of strong winds. We demonstrate the performance of our system through extensive experiments on real images and field tests in a cluttered outdoor environment.