 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Learning from Randomized Simulations: A Review
Paper and Code
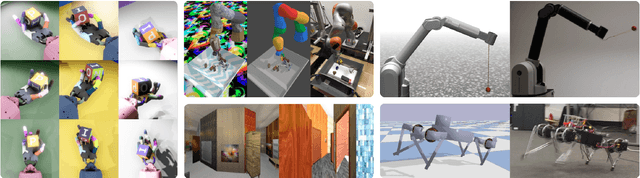

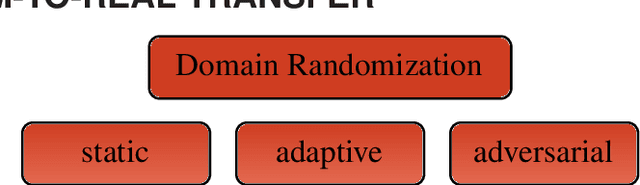
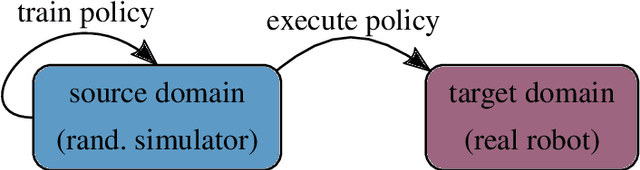
The rise of deep learning has caused a paradigm shift in robotics research, favoring methods that require large amounts of data. It is prohibitively expensive to generate such data sets on a physical platform. Therefore, state-of-the-art approaches learn in simulation where data generation is fast as well as inexpensive and subsequently transfer the knowledge to the real robot (sim-to-real). Despite becoming increasingly realistic, all simulators are by construction based on models, hence inevitably imperfect. This raises the question of how simulators can be modified to facilitate learning robot control policies and overcome the mismatch between simulation and reality, often called the 'reality gap'. We provide a comprehensive review of sim-to-real research for robotics, focusing on a technique named 'domain randomization' which is a method for learning from randomized simulations.