 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROBIN : A Benchmark for Robustness to Individual Nuisances in Real-World Out-of-Distribution Shifts
Paper and Code
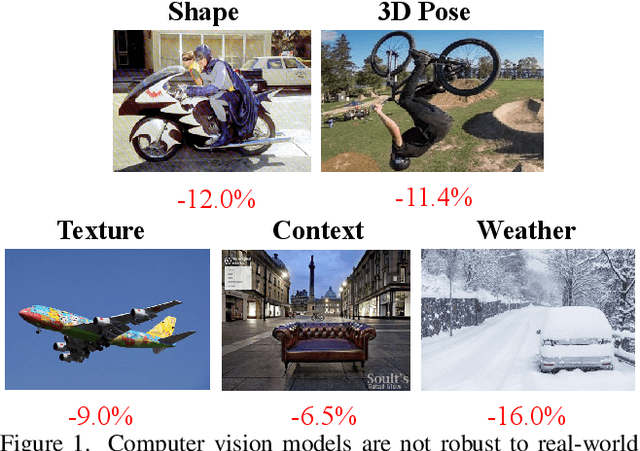
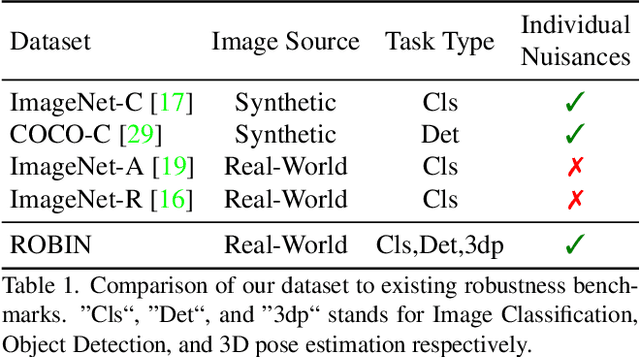
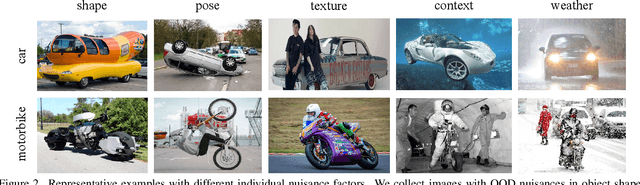
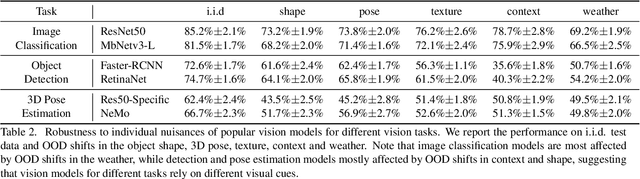
Enhancing the robustness in real-world scenarios has been proven very challenging. One reason is that existing robustness benchmarks are limited, as they either rely on synthetic data or they simply measure robustness as generalization between datasets and hence ignore the effects of individual nuisance factors. In this work, we introduce ROBIN, a benchmark dataset for diagnosing the robustness of vision algorithms to individual nuisances in real-world images. ROBIN builds on 10 rigid categories from the PASCAL VOC 2012 and ImageNet datasets and includes out-of-distribution examples of the objects 3D pose, shape, texture, context and weather conditions. ROBIN is richly annotated to enable benchmark models for image classification, object detection, and 3D pose estimation. We provide results for a number of popular baselines and make several interesting observations: 1. Some nuisance factors have a much stronger negative effect on the performance compared to others. Moreover, the negative effect of an OODnuisance depends on the downstream vision task. 2. Current approaches to enhance OOD robustness using strong data augmentation have only marginal effects in real-world OOD scenarios, and sometimes even reduce the OOD performance. 3. We do not observe any significant differences between convolutional and transformer architectures in terms of OOD robustness. We believe our dataset provides a rich testbed to study the OOD robustness of vision algorithms and will help to significantly push forward research in this area.