 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRING++: Roto-translation Invariant Gram for Global Localization on a Sparse Scan Map
Paper and Code
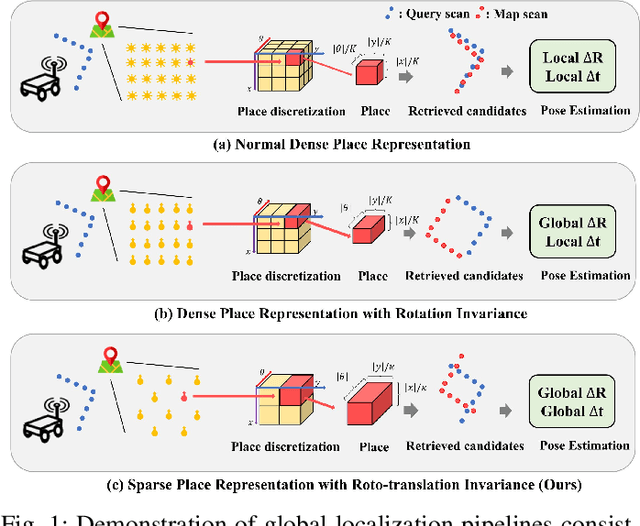
Global localization plays a critical role in many robot applications. LiDAR-based global localization draws the community's focus with its robustness against illumination and seasonal changes. To further improve the localization under large viewpoint differences, we propose RING++ which has roto-translation invariant representation for place recognition, and global convergence for both rotation and translation estimation. With the theoretical guarantee, RING++ is able to address the large viewpoint difference using a lightweight map with sparse scans. In addition, we derive sufficient conditions of feature extractors for the representation preserving the roto-translation invariance, making RING++ a framework applicable to generic multi-channel features. To the best of our knowledge, this is the first learning-free framework to address all subtasks of global localization in the sparse scan map. Validations on real-world datasets show that our approach demonstrates better performance than state-of-the-art learning-free methods, and competitive performance with learning-based methods. Finally, we integrate RING++ into a multi-robot/session SLAM system, performing its effectiveness in collaborative applications.