Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Optimal Transport in Offline Reinforcement Learning
Paper and Code
Oct 17, 2024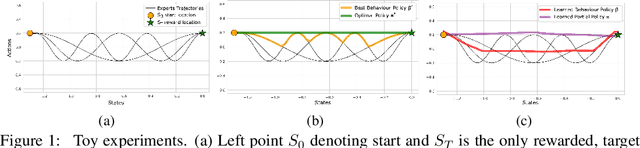
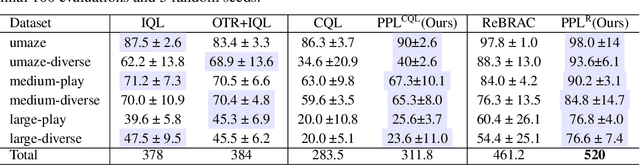
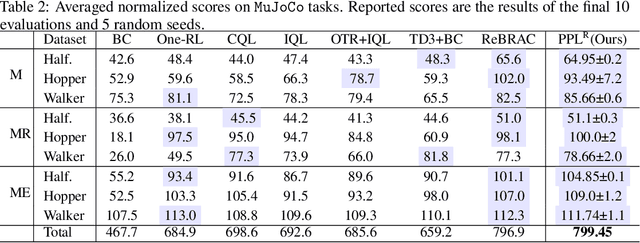
We propose a novel algorithm for offline reinforcement learning using optimal transport. Typically, in offline reinforcement learning, the data is provided by various experts and some of them can be sub-optimal. To extract an efficient policy, it is necessary to \emph{stitch} the best behaviors from the dataset. To address this problem, we rethink offline reinforcement learning as an optimal transportation problem. And based on this, we present an algorithm that aims to find a policy that maps states to a \emph{partial} distribution of the best expert actions for each given state. We evaluate the performance of our algorithm on continuous control problems from the D4RL suite and demonstrate improvements over existing methods.
View paper on