 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR2S100K: Road-Region Segmentation Dataset For Semi-Supervised Autonomous Driving in the Wild
Paper and Code
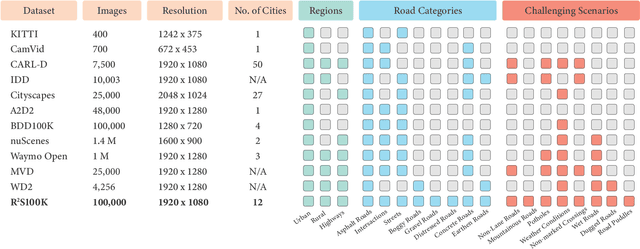

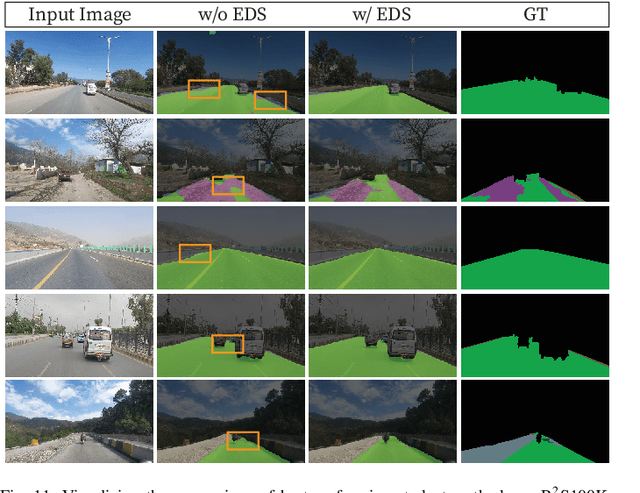
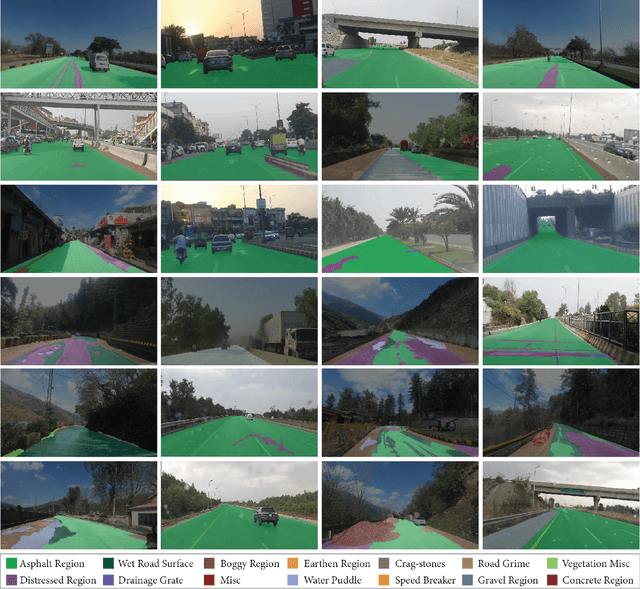
Semantic understanding of roadways is a key enabling factor for safe autonomous driving. However, existing autonomous driving datasets provide well-structured urban roads while ignoring unstructured roadways containing distress, potholes, water puddles, and various kinds of road patches i.e., earthen, gravel etc. To this end, we introduce Road Region Segmentation dataset (R2S100K) -- a large-scale dataset and benchmark for training and evaluation of road segmentation in aforementioned challenging unstructured roadways. R2S100K comprises 100K images extracted from a large and diverse set of video sequences covering more than 1000 KM of roadways. Out of these 100K privacy respecting images, 14,000 images have fine pixel-labeling of road regions, with 86,000 unlabeled images that can be leveraged through semi-supervised learning methods. Alongside, we present an Efficient Data Sampling (EDS) based self-training framework to improve learning by leveraging unlabeled data. Our experimental results demonstrate that the proposed method significantly improves learning methods in generalizability and reduces the labeling cost for semantic segmentation tasks. Our benchmark will be publicly available to facilitate future research at https://r2s100k.github.io/.