 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjective Manifold Gradient Layer for Deep Rotation Regression
Paper and Code
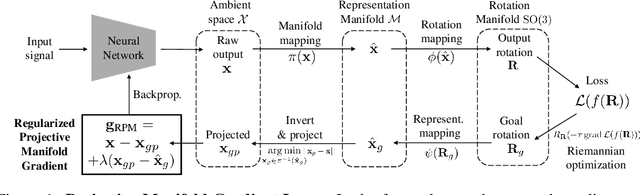

Regressing rotations on SO(3) manifold using deep neural networks is an important yet unsolved problem. The gap between Euclidean network output space and the non-Euclidean SO(3) manifold imposes a severe challenge for neural network learning in both forward and backward passes. While several works have proposed different regression-friendly rotation representations, very few works have been devoted to improving the gradient backpropagating in the backward pass. In this paper, we propose a manifold-aware gradient that directly backpropagates into deep network weights. Leveraging the Riemannian gradient and a novel projective gradient, our proposed regularized projective manifold gradient (RPMG) helps networks achieve new state-of-the-art performance in a variety of rotation estimation tasks. The proposed gradient layer can also be applied to other smooth manifolds such as the unit sphere.