 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointCAT: Contrastive Adversarial Training for Robust Point Cloud Recognition
Paper and Code
Sep 16, 2022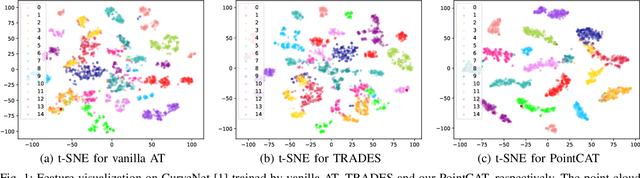
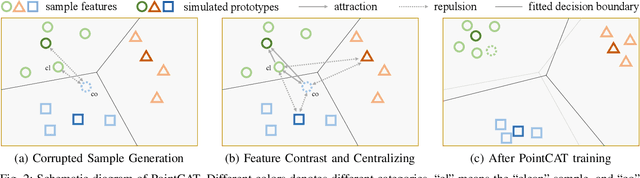
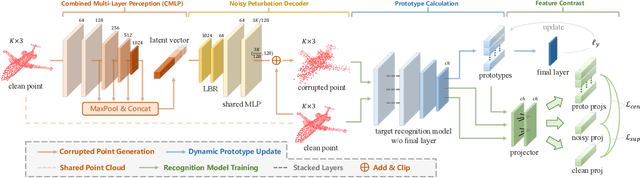
Notwithstanding the prominent performance achieved in various applications, point cloud recognition models have often suffered from natural corruptions and adversarial perturbations. In this paper, we delve into boosting the general robustness of point cloud recognition models and propose Point-Cloud Contrastive Adversarial Training (PointCAT). The main intuition of PointCAT is encouraging the target recognition model to narrow the decision gap between clean point clouds and corrupted point clouds. Specifically, we leverage a supervised contrastive loss to facilitate the alignment and uniformity of the hypersphere features extracted by the recognition model, and design a pair of centralizing losses with the dynamic prototype guidance to avoid these features deviating from their belonging category clusters. To provide the more challenging corrupted point clouds, we adversarially train a noise generator along with the recognition model from the scratch, instead of using gradient-based attack as the inner loop like previous adversarial training methods. Comprehensive experiments show that the proposed PointCAT outperforms the baseline methods and dramatically boosts the robustness of different point cloud recognition models, under a variety of corruptions including isotropic point noises, the LiDAR simulated noises, random point dropping and adversarial perturbations.