 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Assembly Sequence with Graph Transformer
Paper and Code
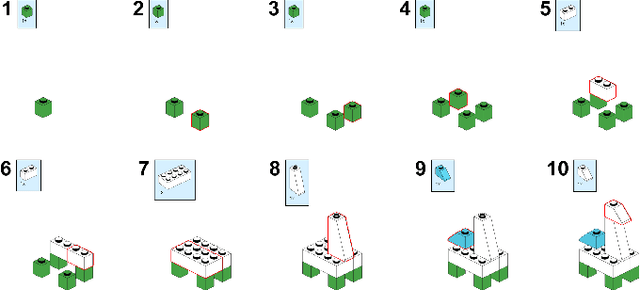
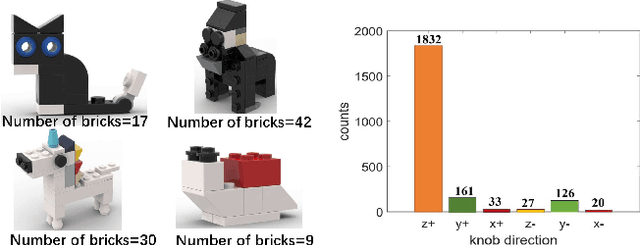

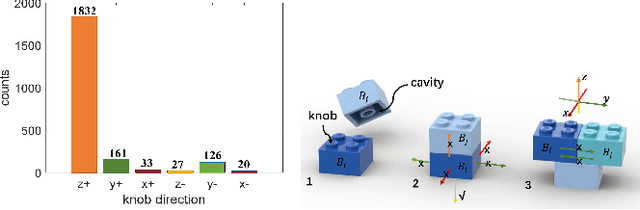
Assembly sequence planning (ASP) is the essential process for modern manufacturing, proven to be NP-complete thus its effective and efficient solution has been a challenge for researchers in the field. In this paper, we present a graph-transformer based framework for the ASP problem which is trained and demonstrated on a self-collected ASP database. The ASP database contains a self-collected set of LEGO models. The LEGO model is abstracted to a heterogeneous graph structure after a thorough analysis of the original structure and feature extraction. The ground truth assembly sequence is first generated by brute-force search and then adjusted manually to in line with human rational habits. Based on this self-collected ASP dataset, we propose a heterogeneous graph-transformer framework to learn the latent rules for assembly planning. We evaluated the proposed framework in a series of experiment. The results show that the similarity of the predicted and ground truth sequences can reach 0.44, a medium correlation measured by Kendall's $\tau$. Meanwhile, we compared the different effects of node features and edge features and generated a feasible and reasonable assembly sequence as a benchmark for further research. Our data set and code is available on https://github.com/AIR-DISCOVER/ICRA\_ASP.