 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanar Object Tracking in the Wild: A Benchmark
Paper and Code
May 22, 2018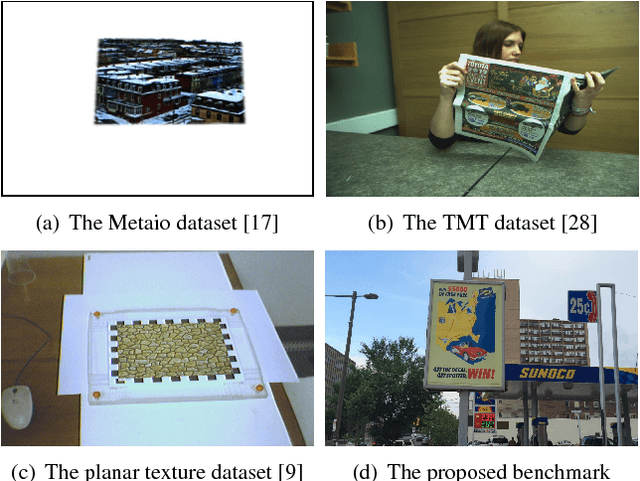
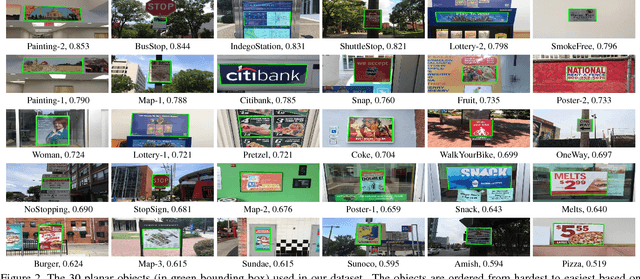
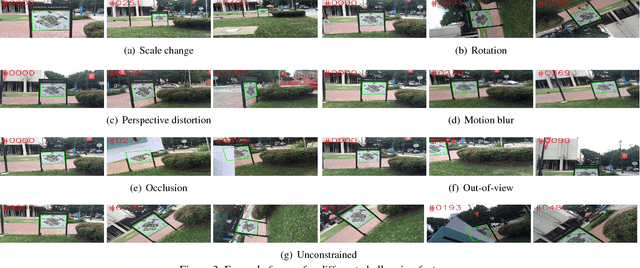
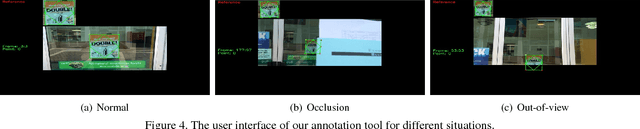
Planar object tracking is an actively studied problem in vision-based robotic applications. While several benchmarks have been constructed for evaluating state-of-the-art algorithms, there is a lack of video sequences captured in the wild rather than in constrained laboratory environment. In this paper, we present a carefully designed planar object tracking benchmark containing 210 videos of 30 planar objects sampled in the natural environment. In particular, for each object, we shoot seven videos involving various challenging factors, namely scale change, rotation, perspective distortion, motion blur, occlusion, out-of-view, and unconstrained. The ground truth is carefully annotated semi-manually to ensure the quality. Moreover, eleven state-of-the-art algorithms are evaluated on the benchmark using two evaluation metrics, with detailed analysis provided for the evaluation results. We expect the proposed benchmark to benefit future studies on planar object tracking.