 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlace Recognition with Event-based Cameras and a Neural Implementation of SeqSLAM
Paper and Code
May 18, 2015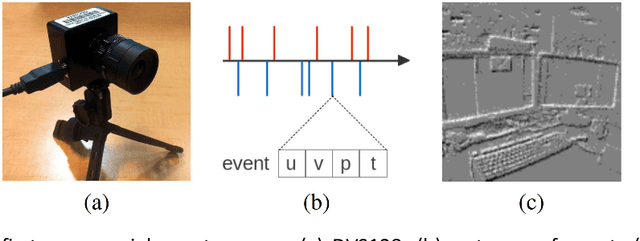
Event-based cameras offer much potential to the fields of robotics and computer vision, in part due to their large dynamic range and extremely high "frame rates". These attributes make them, at least in theory, particularly suitable for enabling tasks like navigation and mapping on high speed robotic platforms under challenging lighting conditions, a task which has been particularly challenging for traditional algorithms and camera sensors. Before these tasks become feasible however, progress must be made towards adapting and innovating current RGB-camera-based algorithms to work with event-based cameras. In this paper we present ongoing research investigating two distinct approaches to incorporating event-based cameras for robotic navigation: the investigation of suitable place recognition / loop closure techniques, and the development of efficient neural implementations of place recognition techniques that enable the possibility of place recognition using event-based cameras at very high frame rates using neuromorphic computing hardware.